ロボット・マニピュレーションに関する研究
組立作業用汎用ハンドの機構設計と把持戦略の計画
変種変量生産に適したロボットセル生産システムでは,ロボットは様々な形状の部品を精確に把持して組立作業を行う必要があるため,現在は,主に専用の部品供給機等で事前整列された部品を,各部品の形状に特化した専用グリッパを使い分けて把持するという方法がとられています.しかし,こうした専用機器を数多く使用すると,システムが非常に高コストなものとなります.
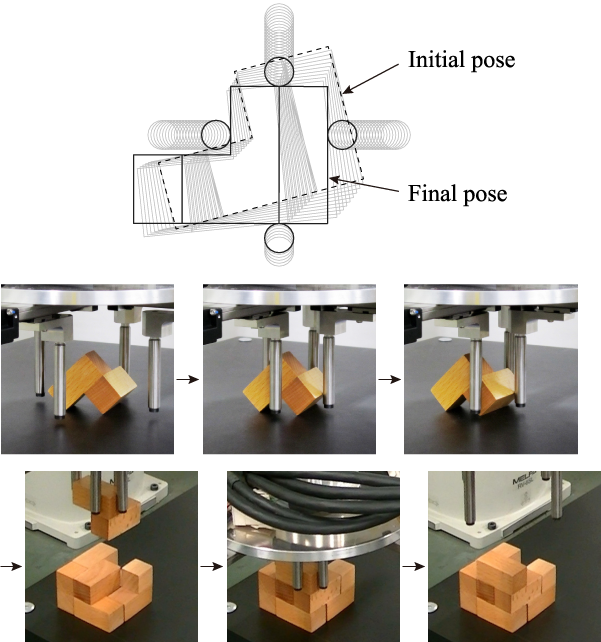
本研究では,様々な形状の部品を整列させ,精確な把持を実現することによって組立作業を遂行できるような汎用的なロボットハンド(以下,汎用ハンド)の機構設計と,その把持戦略の計画を行っています.本研究の手法を用いると,事前整列されていない部品に対して,視覚センサで時々刻々の部品の位置・姿勢を確認しなくても,指が閉じていくに従って部品を目的の位置・姿勢へ整列させ,精確な把持を実現することができ,ロボットセルの汎用化が期待されます.
※本研究のデモンストレーション(立体パズルの組立作業の実現)の動画は こちら.
チェーン/タイミングベルトの組付戦略の構築
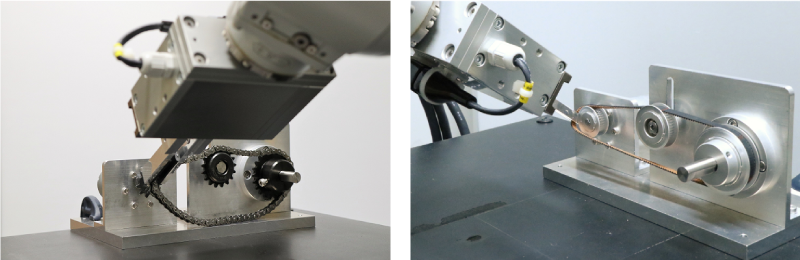
汎用性と柔軟性を備えた組立作業用ロボットシステムを実現するためには,ロボットは剛体部品だけではなく柔軟部品も扱える必要があります.そうしたロボットの技術力を競う国際競技会「World Robot Summit」の2018年大会では,チェーンやタイミングベルトの組付作業が難課題として出題されましたが,いずれの参加チームもこれを達成することができませんでした.チェーンは剛柔両方の特性を持ち,また,タイミングベルトは柔軟であるものの伸びにくく,さらに個体差が大きいという特性があり,いずれもロボットで扱うのが難しい部品です.
本研究では,従来多用されている平行グリッパを用いて,チェーンを複数のスプロケットに,また,タイミングベルトを複数のタイミングプーリに,それぞれ外界センサを用いなくても組付けられるような戦略を構築しています.チェーンについては,その変形特性を利用した戦略を,タイミングベルトについては,組付け先のプーリとの間のわずかな隙間の利用と,強制変形による個体差の吸収を行う戦略を,それぞれ提案しています.こうしたロボットでの扱いが困難な部品の組付けの実現は,組立作業用ロボットシステムの性能の向上に寄与すると期待されます.
※本研究のデモンストレーション(チェーンの組付作業)の動画は こちら.
※本研究のデモンストレーション(タイミングベルトの組付作業)の動画は こちら.
組立作業のための部品の効率的な姿勢遷移操作の計画
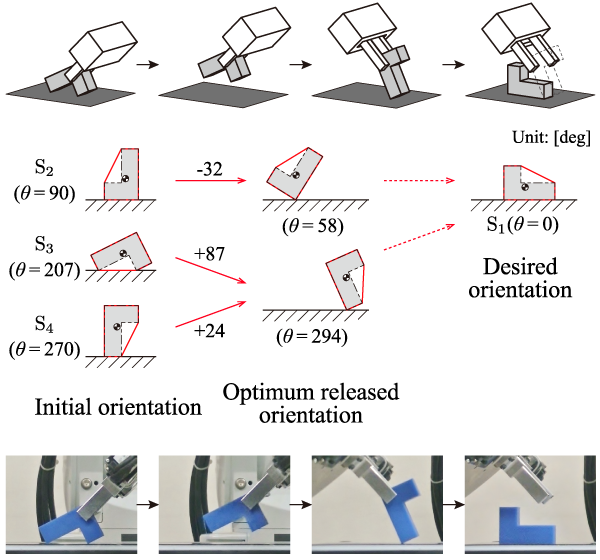
ロボットによる汎用的な自動組立システムでは,ロボットは,ある初期姿勢で供給された対象部品を組付け作業の遂行に適した姿勢に遷移させる必要があります.単純な二指グリッパを用いて部品の姿勢遷移操作を行うための最も一般的な従来の動作戦略では,グリッパと作業台との干渉やロボットの関節限界を避けるために,ピック・アンド・プレース操作を複数回行わなければならない場合が少なくありません.
本研究では,単純なグリッパによる新たな動作戦略を用いた姿勢遷移操作の計画方法を構築しています.この戦略では,部品が不安定姿勢にある状態でのリリース動作を許容し,リリース後に部品を転倒させて目標の最終姿勢に遷移させます.この戦略を用いることで,上述のグリッパと作業台との干渉などが回避しやすくなり,姿勢遷移操作を効率化できることが期待されます.
人間の作業スキルを実現するマクロ・マイクロ型組立ロボットシステムの開発
従来のロボットによる自動組立システムでは,ロボットは人間が予め教示した動作を再生します.教示作業では,専用の冶具などで所定の位置・姿勢に固定された対象部品に対して,現物合わせによりロボットの動作を細かく調整する必要があり,膨大な時間を要します.また,ロボットは各部品の形状に特化した専用グリッパを使い分けて部品を把持しており,汎用性が低いという問題があります.
本研究では,直接教示を通して人間の作業スキルを実現し,また,上述の研究テーマで別途提案している汎用ハンドと把持戦略によって多形状部品の組立作業を遂行できるような,マクロ・マイクロ型組立ロボットシステムの開発を行っています.これを用いることで,教示作業にかかる時間を大幅に削減するとともに,組立システムの汎用化が期待されます.なお,本研究は神戸大学と共同で行っています.