- Home >
- Research
Research Topic
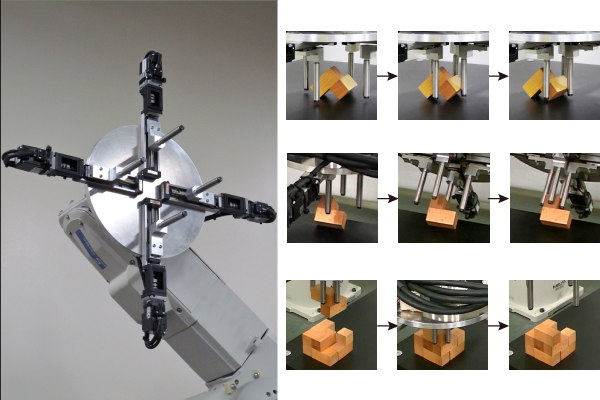
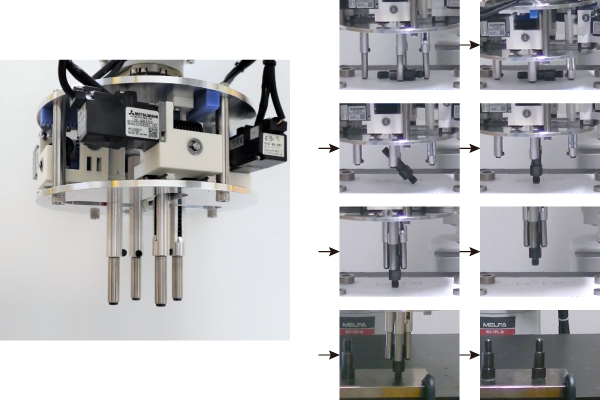
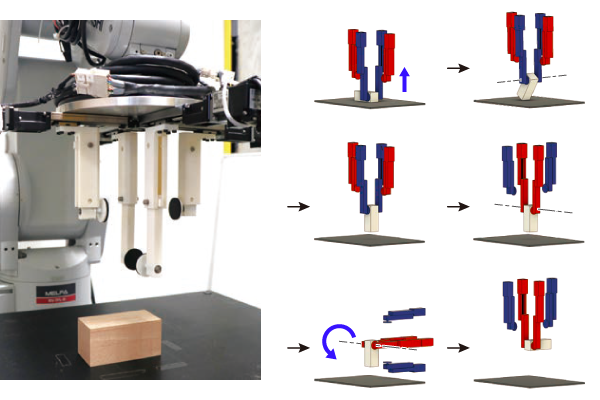
Four-fingered Robotic Hand for In-hand Reorientation of an Object
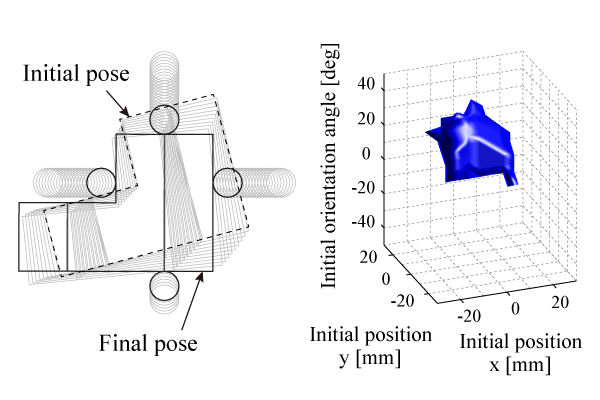
Alignment of Parts toward the 2nd-order Form Closure Grasp
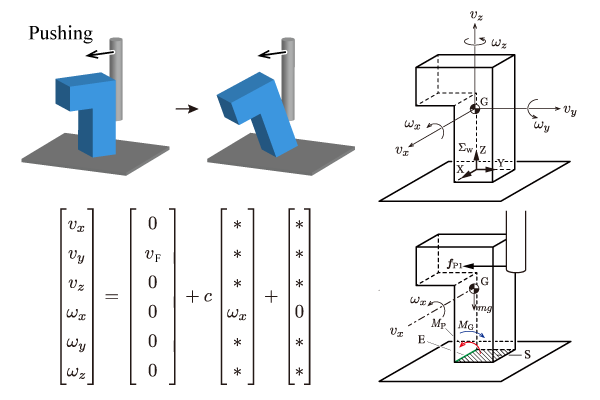
Analysis of Wobbling of a Part in Pushing Operation
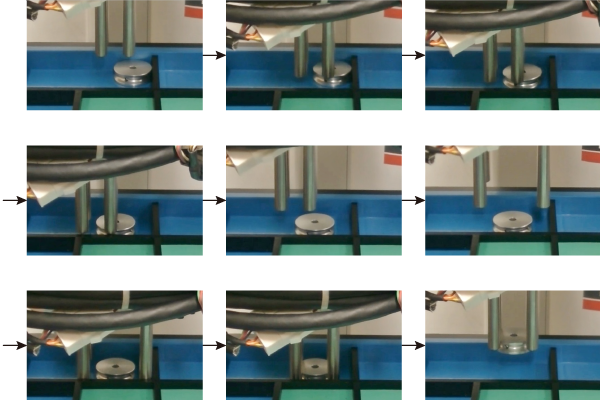
Strategy for Picking a Part in the Corner of a Parts Tray
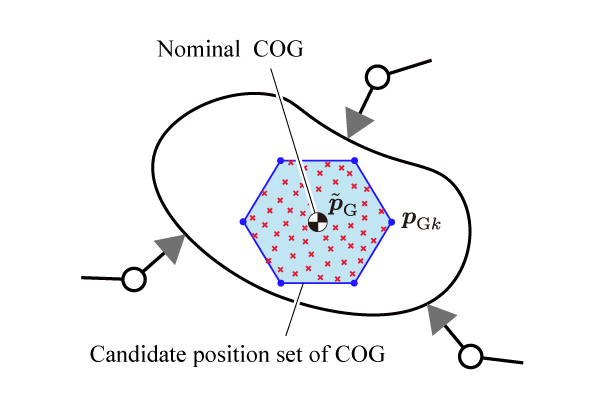
Grasp Planning for an Object with Indeterminate COG
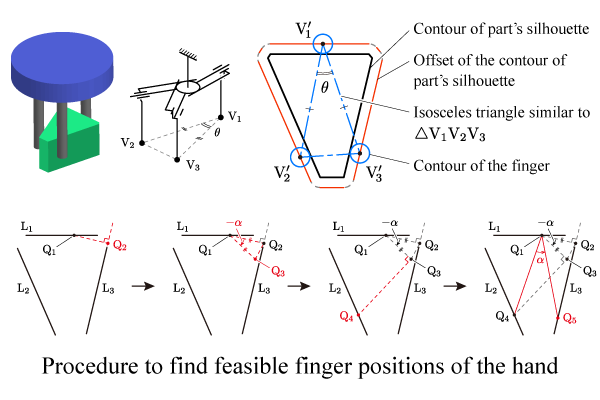
Grasp Planning of a Low-DoF Robotic Hand with Parallel Stick Fingers
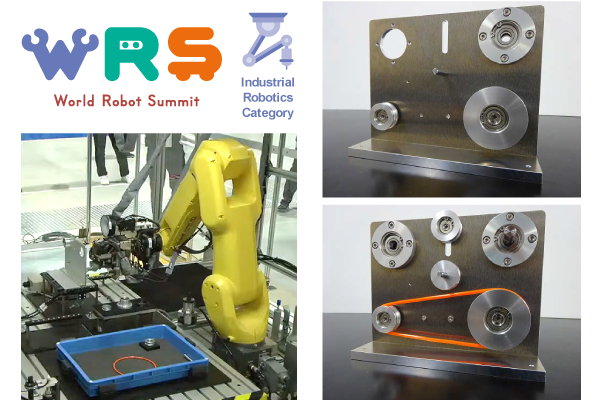
Design & Analysis of the Competition in the World Robot Summit
*Collaborating with Kindai Univ. and others
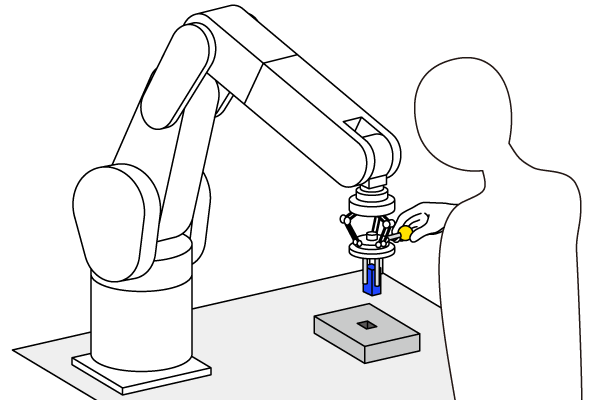
Macro-micro Robotic System with Human Skill for Assembly Tasks
*Collaborating with Kobe Univ.
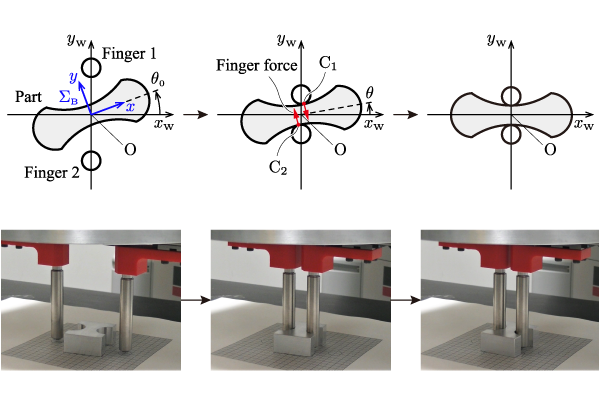
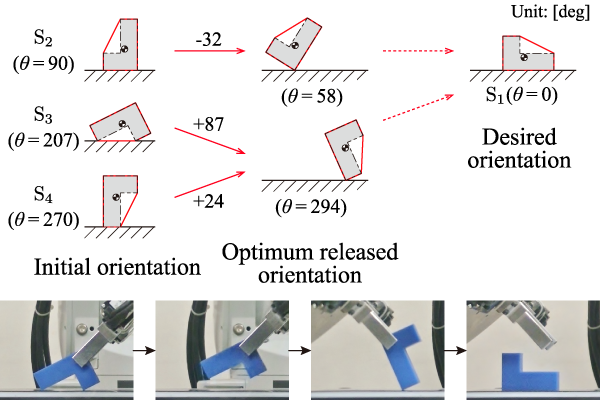
Strategy to Reorient a Part by Releasing in Its Unstable Pose
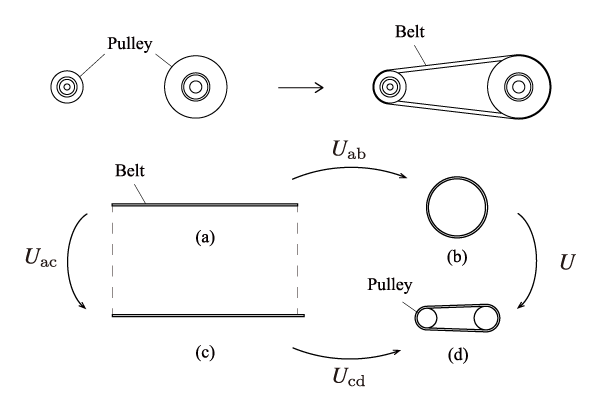
Difficulty Evaluation of Assembly Tasks Including Deformable Parts
Stem Removal of a Cherry Tomato Capable of Avoiding Dehiscence
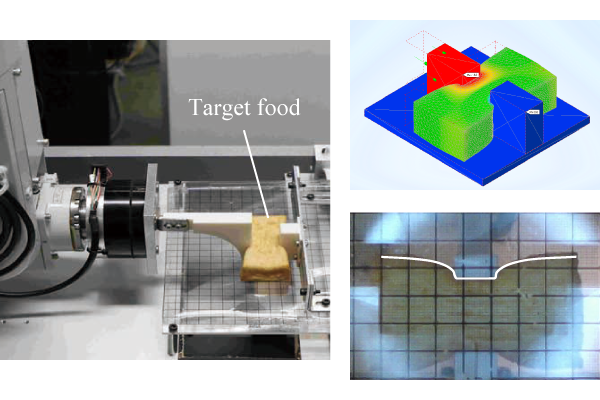
Analysis of Deformation of Shaped Food at Grasping by Parallel Gripper
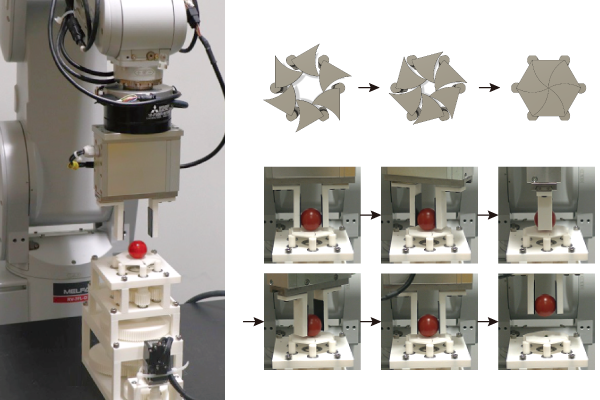
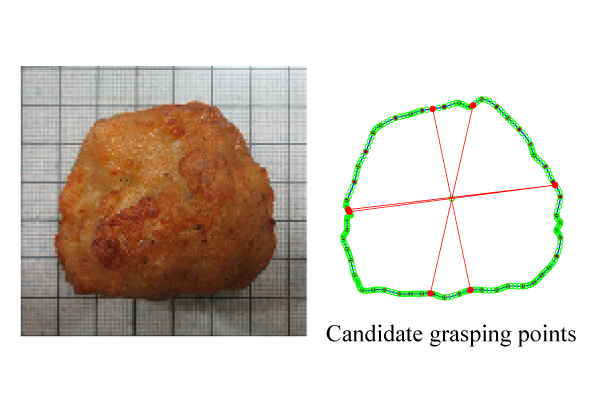
Grasp Planning for Stable Grasping and High-speed Transporting of Food
*Collaborating with Mitsubishi Electric Corp.
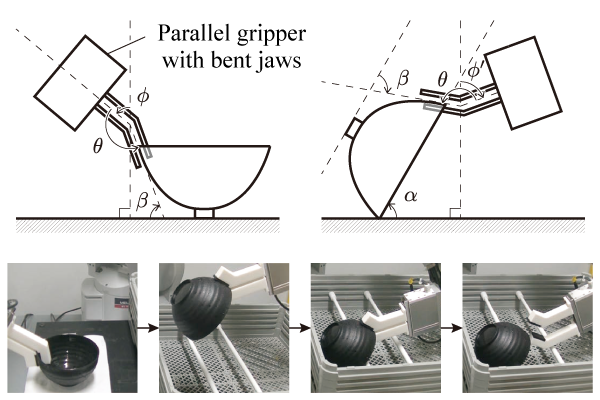
Design of Bent Jaws of a Parallel Gripper for Dishwashing
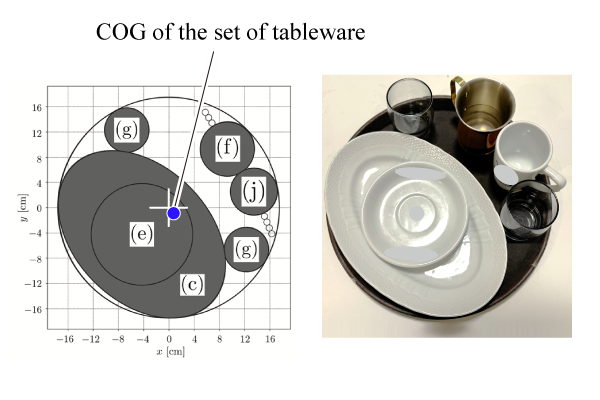
Arrangement Planning of Tableware for Automated Clearing Up of a Table
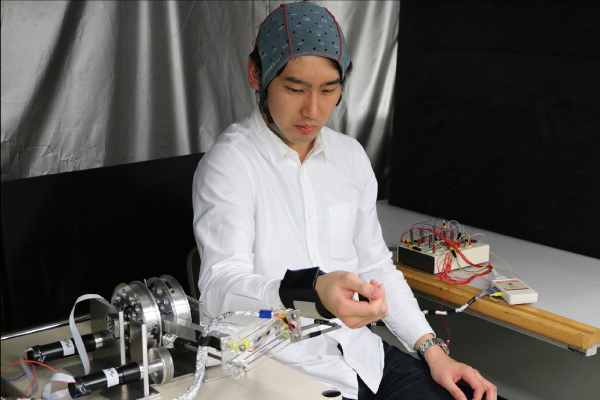
EEG Driven Robotic System for Efficient Stroke Rehabilitation
*Collaborating with Ritsumeikan Univ.