知能制御システムに関する研究
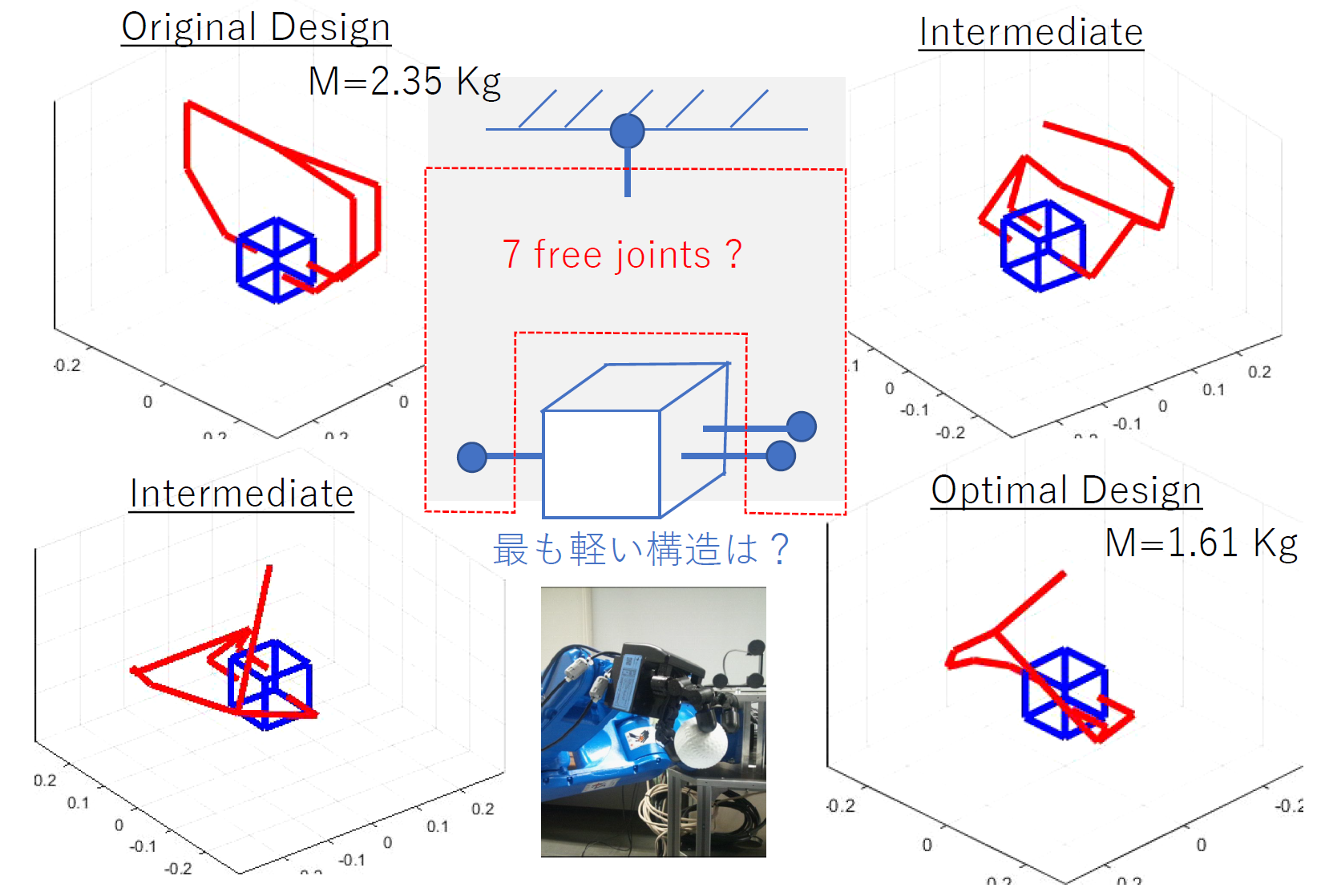
指数座標と呼ばれる新しい数学モデルを用いた, ロボットの運動制御,ならびに,構造設計に関する研究を行っています. また,多指ハンドによる物体の把握・操り制御系の高機能化に関する研究も行っています。
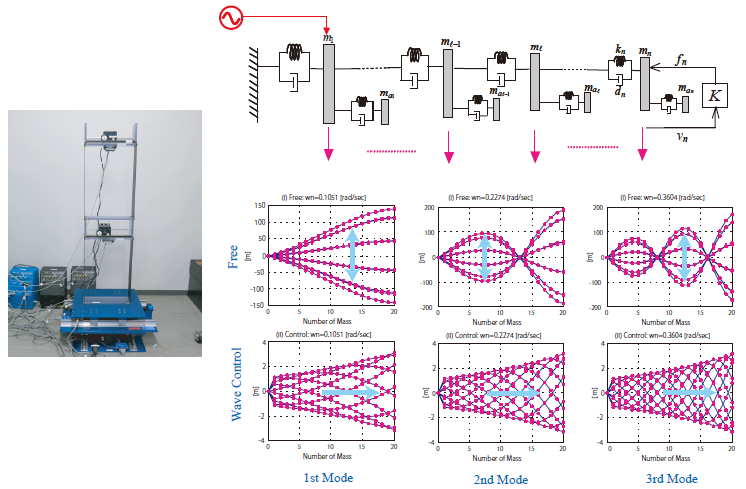
モード制御法に代わる新しい振動制御法として,波動制御法と呼ばれる制御手法の研究を行っています. また,H∞制御などのロバスト制御法を用いた振動制御に関する研究も行っています。
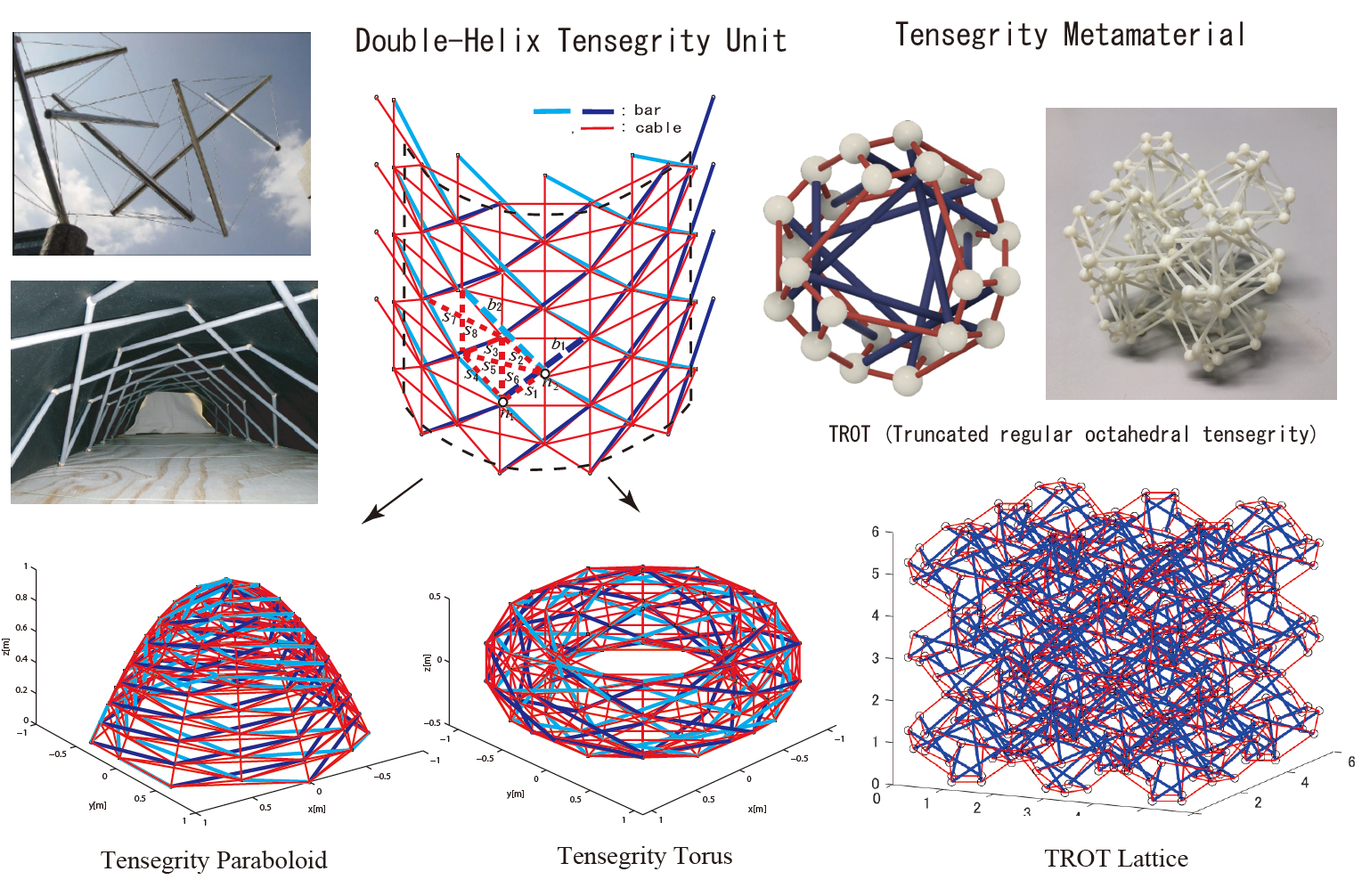
棒とケーブルから構成される軸力構造に対する, 解析手法,ならびに,それを利用した構造設計法について研究を行っています. また,メタマテリアルの構成要素としての利用法についても検討を行っています.
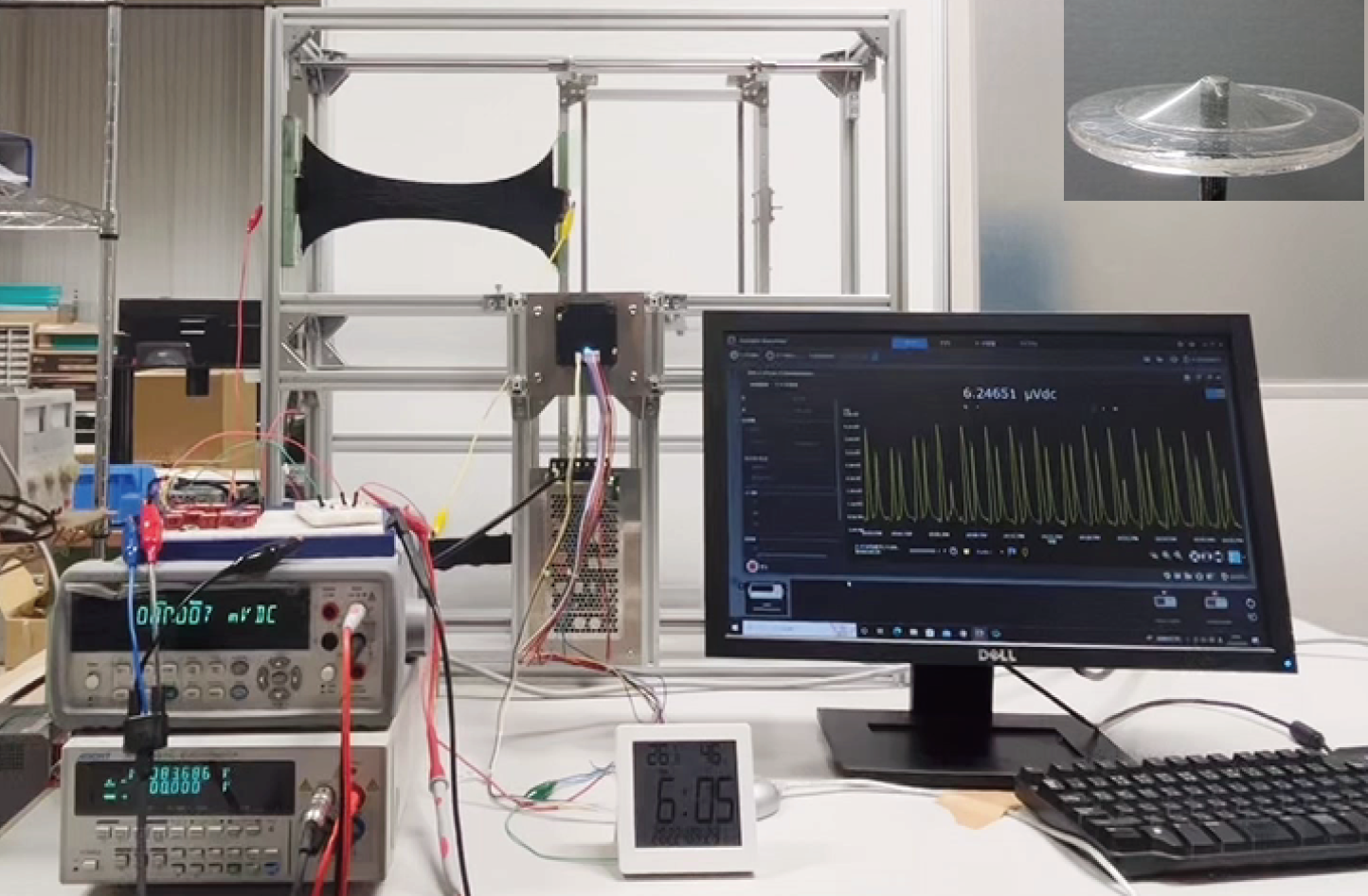
人体運動や波浪などの環境振動を利用した発電装置として,誘電エラストマーを用いた振動発電装置の開発を行っています. また,圧電素子を利用した振動制御法についての研究も行っています.