

Mobile platform for all terrain, RT-Mover series (original version, D-type, S-type)
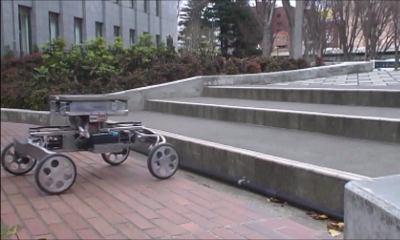
There is a strong demand for practical robots, such as a porter robot, a security patrol robot and etc. It is necessary for them to move over rough terrain while carrying a load horizontally. We have developed its mobile platform for all terrain, RT-Mover series, which shows adequate mobility perfomance in targeted environments. It has four drivable wheels and two leg-like axles. A strength of this type of robots is that they can switch between a wheel mode and a leg mode depending on a terrain even in a simple mechanism.
We are studying useful research topics from various kinds of views, such as mechanical design, control system, sensing and etc.

RT-Mover original

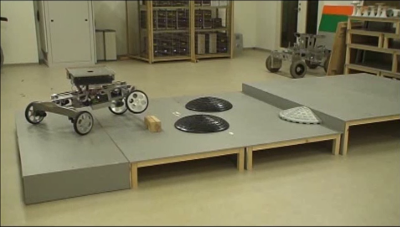
RT-Mover D-type

RT-Mover D-type

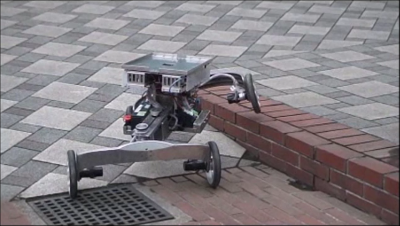
S-type
Movie gallery
movie 1

movie 2
movie 3
movie 4