Technologes for PMV Self Driving System
自動運転システムを構成する技術
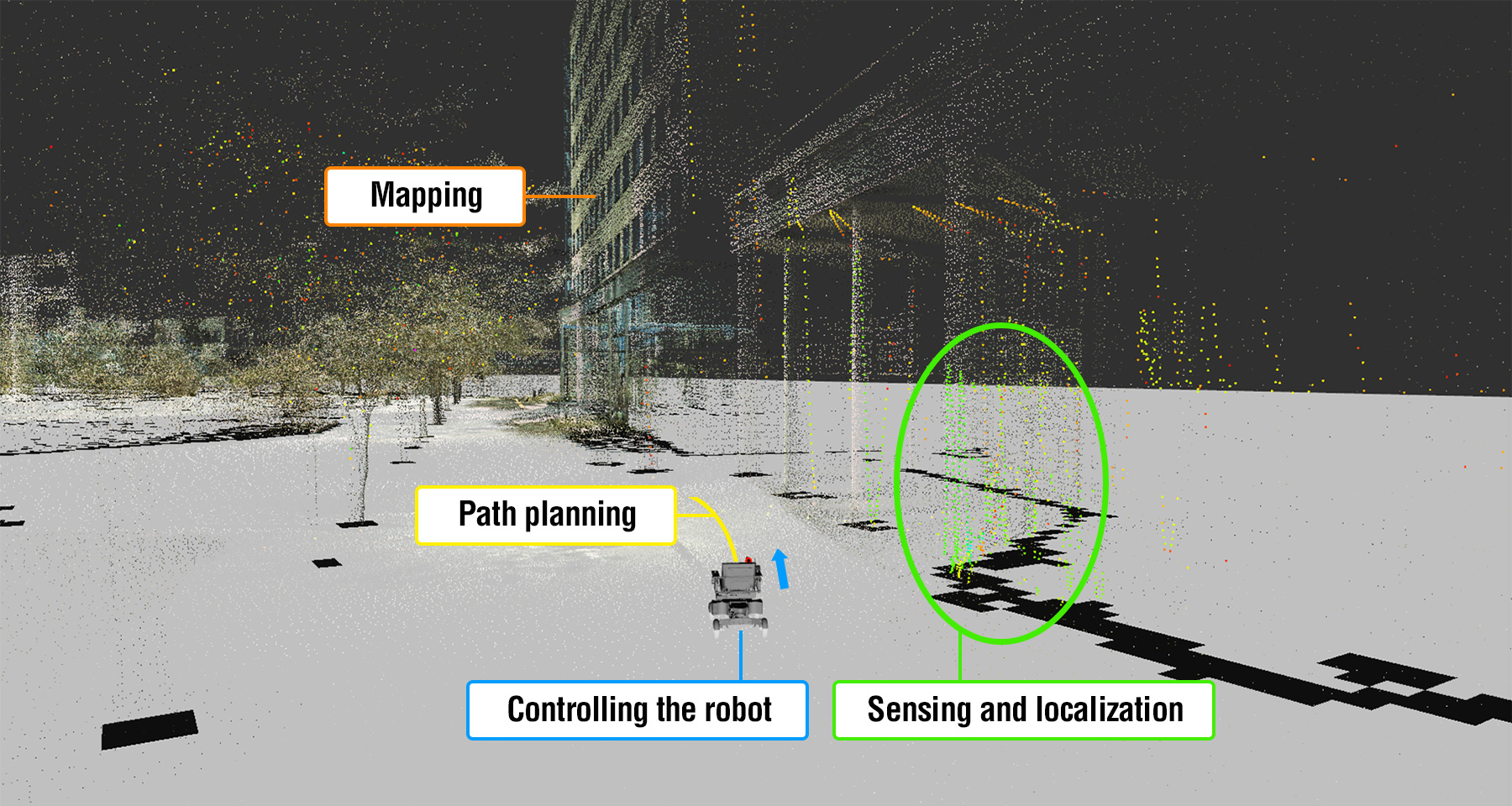
Mapping
自動運転を行うためには、どこにいるのか、どこにいくのかなどを決めるために「地図」情報が必要である。
地図作成手法の例として、例えば以下がある。
1. 3次元測量による地図作成手法
2. NDT Mapping 手法
3次元測量による地図作成手法
- 使用機材 Leica ScanStation C10
- レーザースキャナで障害物との距離を計測
- RGBカメラでその点の色を取得
- 上記を点群データに反映

Leicaカタログより抜粋
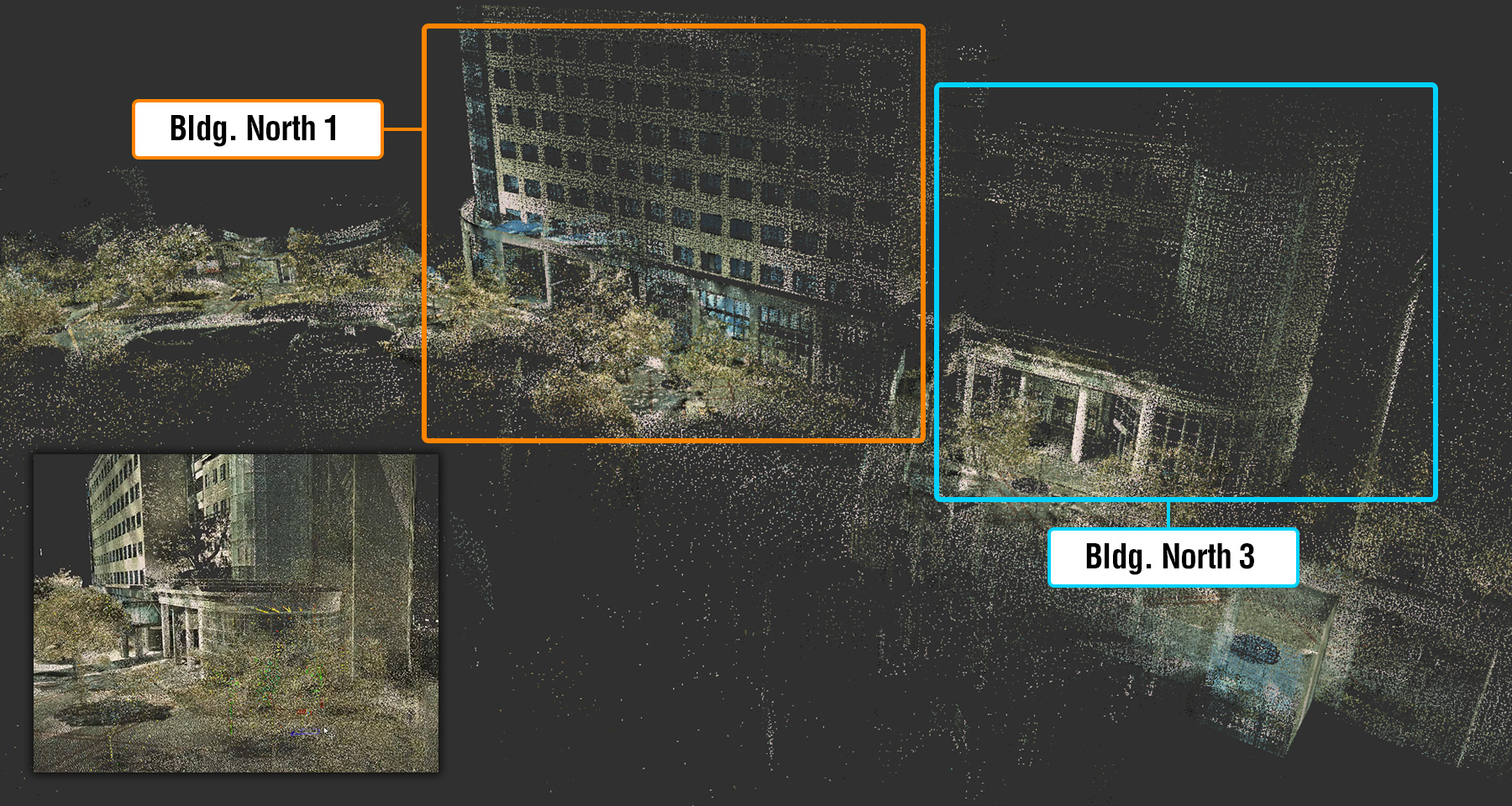
Point Cloud Map (campus of wakayama university)
NDT Mapping 手法
・2つの点群データをマッチングさせるためにNDTアルゴリズムを用いて地図を作成
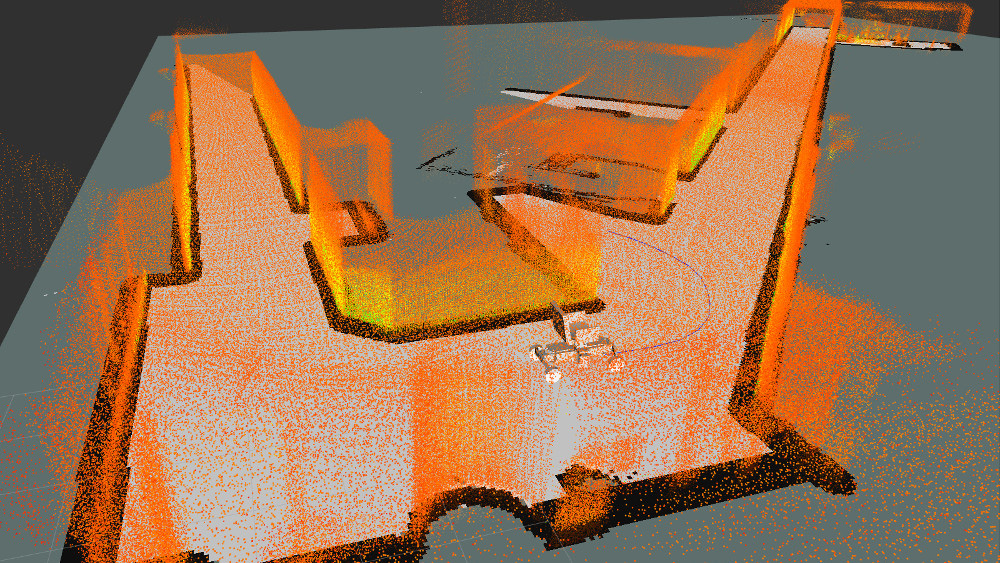
NDT Mapping手法を用いて作成した Point Cloud Data 地図
Normal Distribution Transform (NDT) とは
・探索空間内にある点群データを格子状(ボクセル)に分割し、各格子内の点群データから正規分布準備し、参照スキャンデータとし、センサデータとマッチングを行う手法
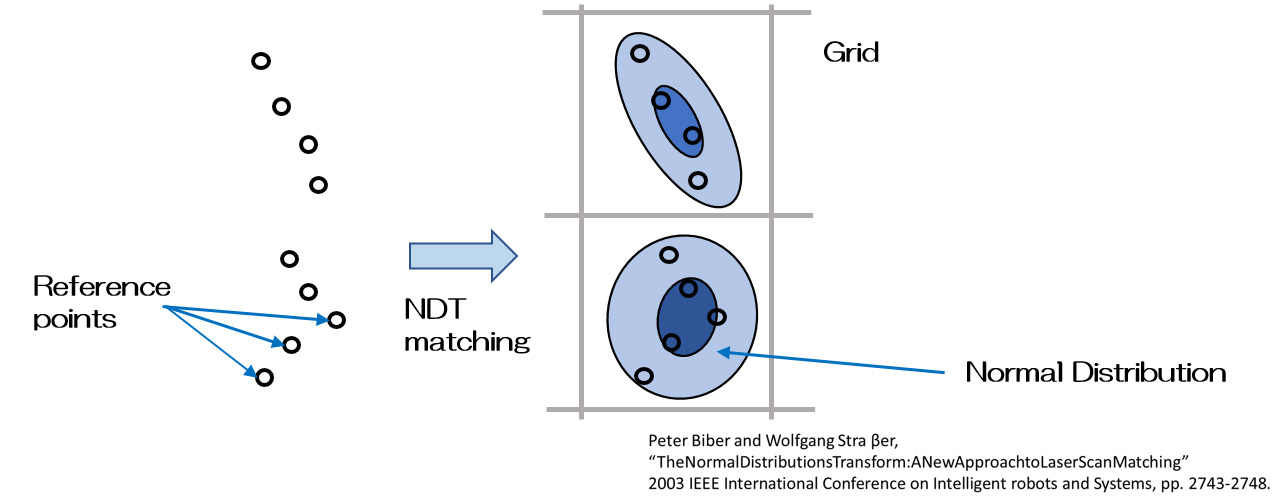
Normal Distribution Transform
Route planning
・目的地はどこ?
・どういう経路で行く?
・障害物がある、どうする?

Planner
目的地に向かって、どの方向に、どの程度の速度で進めばよいのか決める必要がある。
そのために、二つのプランナーを使用する。
Global Path Planner
→大域の経路を作成
ゴールまでの大まかな経路を作成する。
Local Path Planner
→局所的な経路を作成
目的地に向かっている最中に生じる障害物への対応などのために経路を修正、更新する必要がある。
Global Path Planner で使われる代表的な手法
・Grid Path
フィールドをグリッドに区切りグリッド毎のコストを計算し経路を生成
・Simple Potential Calculation
簡易的な人工ポテンシャル法
・Dijkstra's Method
最短経路探索手法
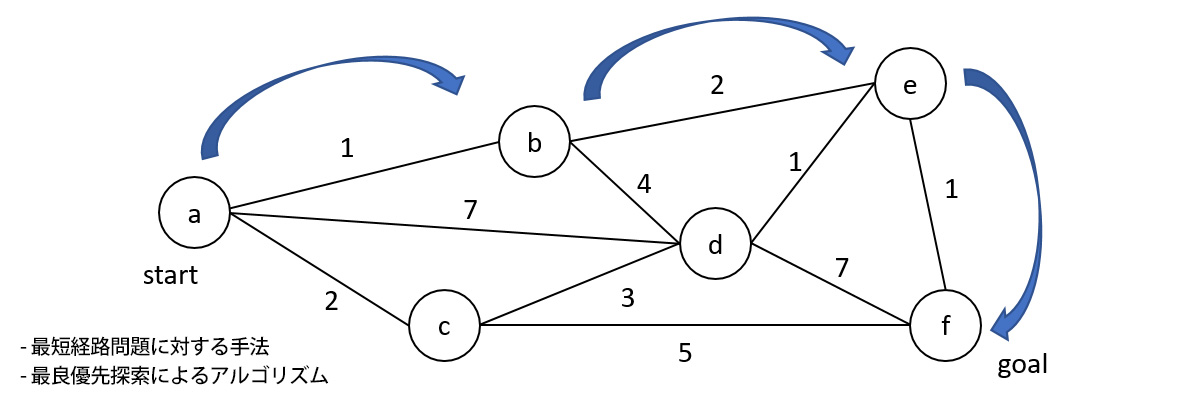
Dijkstra's algorithm
・A*Path
Dijkstra's Methodに“現時点までの距離”と“ゴールまでの推定値”の概念を追加し拡張したもの
Local Path Planner
主要な二つの技術
・Trajectory Rollout Algorithm
B. P. Gerkey and K. Konolige, “Planning and control in unstructured terrain,” in ICRA Workshop on Path Planning on Costmaps, 2008.
・DWA -Dynamic Window Approach-
Fox, D.; Burgard, W.; Thrun, S. “The dynamic window approach to collision avoidance.” IEEE Robotics and Automation Magazine 1997, 4, 23–33.
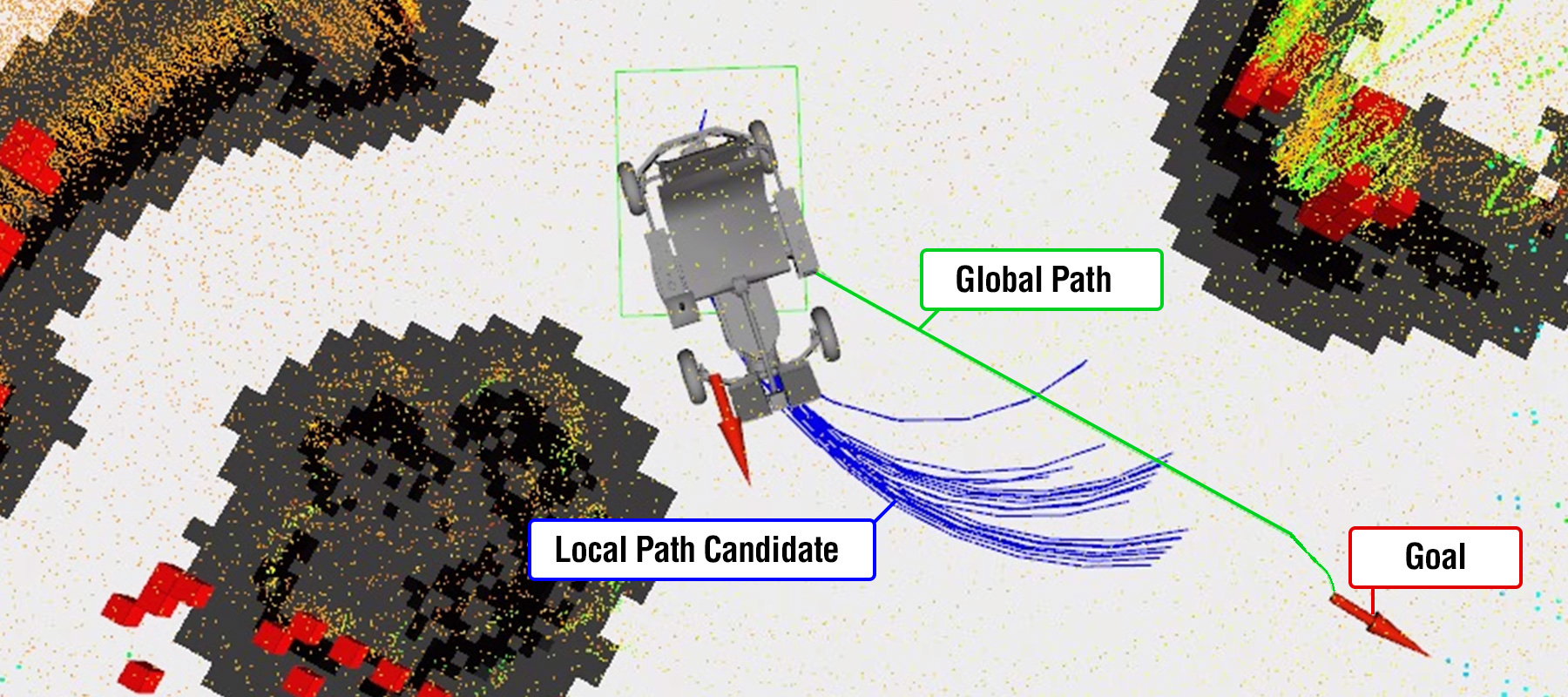
[Trajectory Rollout Algorithmの概要]
1.ロボットの速度から次の周期の経路候補を作成
2.障害物までの距離、目標地点までの距離、グローバルパスへの追従、速度を考慮して各候補軌道を評価する

Obs: 軌道上のグリッドのコストを足したもの
Gdist: 軌道の終点から目的地までの最短経路
Pdist: 軌道の終点から目的地までの最適経路
𝒙 ̇ : 軌道を構成するのX成分(並進成分)
3.各経路候補から障害物に衝突するものを棄却
4.評価式で得られた中で最適ものを選ぶ
Trajectory Rollout Algorithm
Cost map
移動の難しさをコストとして地図上に示したもの
・グローバルコストマップ
大域的な地図で全体を把握
・ローカルコストマップ
局所的な地図で逐次的な変化を反映させる
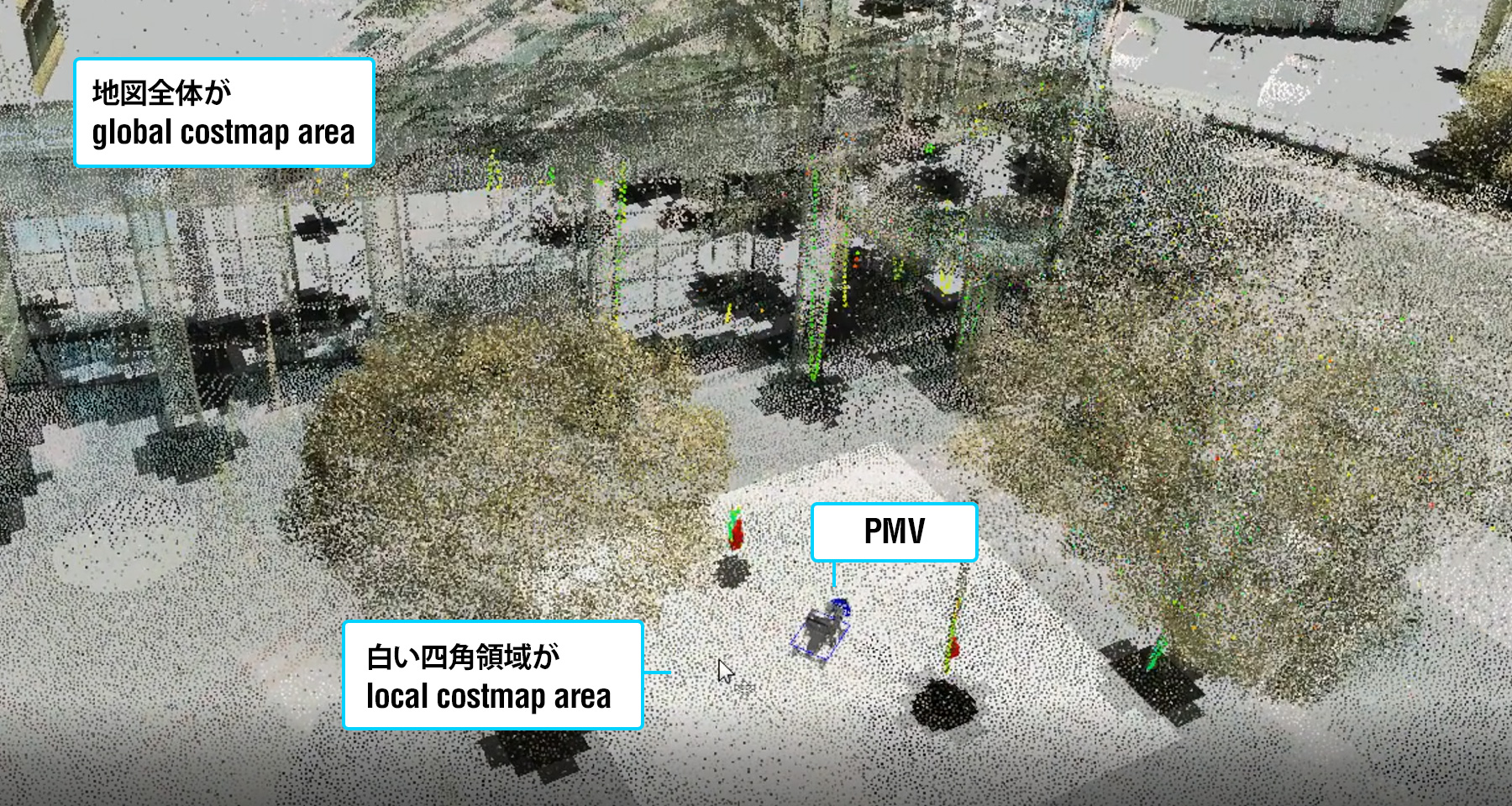
Locl Cost Map / Global Cost Map
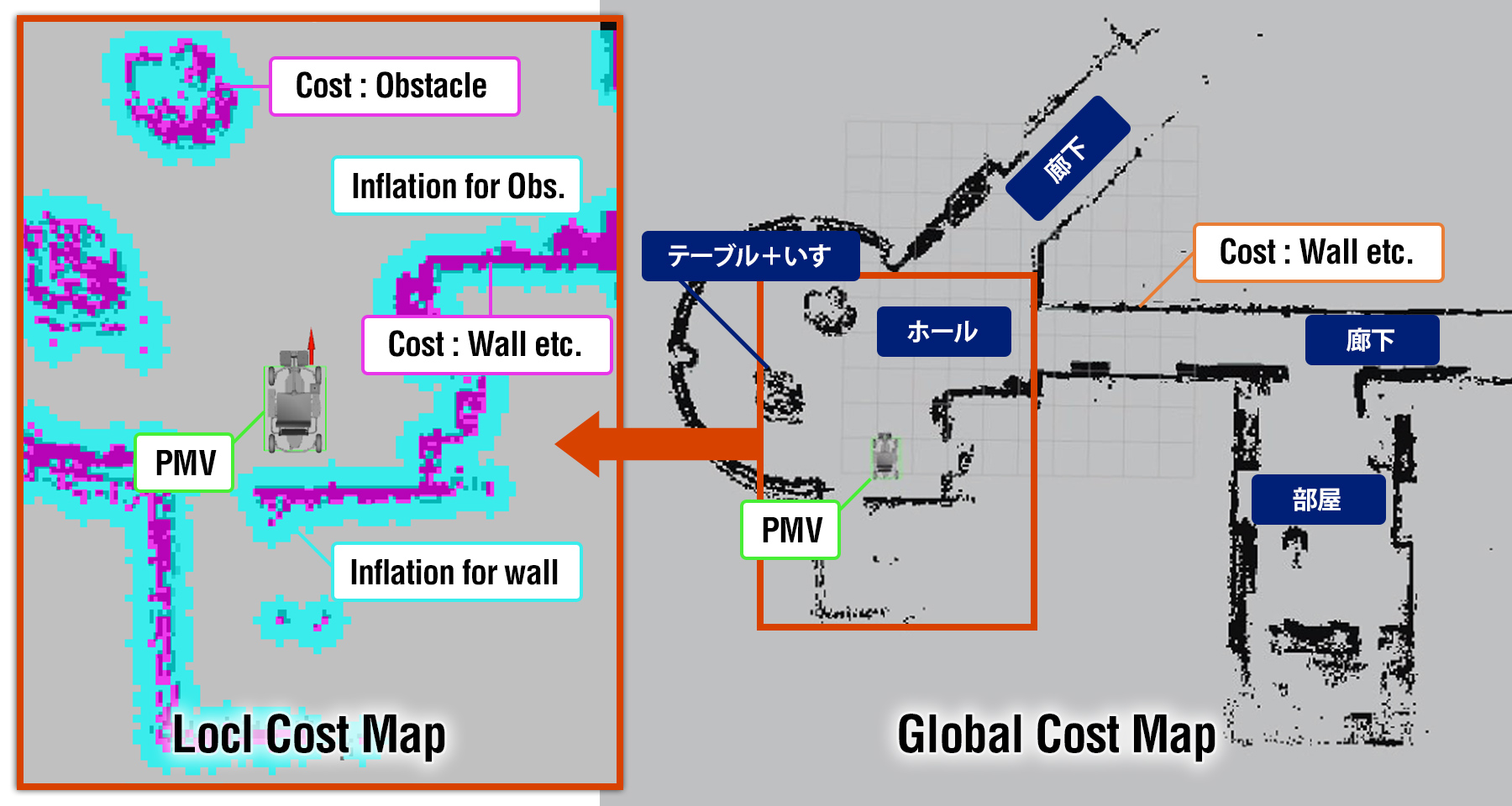
Locl Cost Map : ロボットを中心とし、周囲の情報を表す地図障害物を反映。
Global Cost Map : Point Cloud Dataを表示しないとコストマップが見える。
Updating Cost Maps for Obstacles
・3D Lidarを用いて外界をセンシング
・認識指定範囲に反射点があれば障害物として3次元的に認識し、2次元コストマップ上に反映し、コストマップを逐次更新する
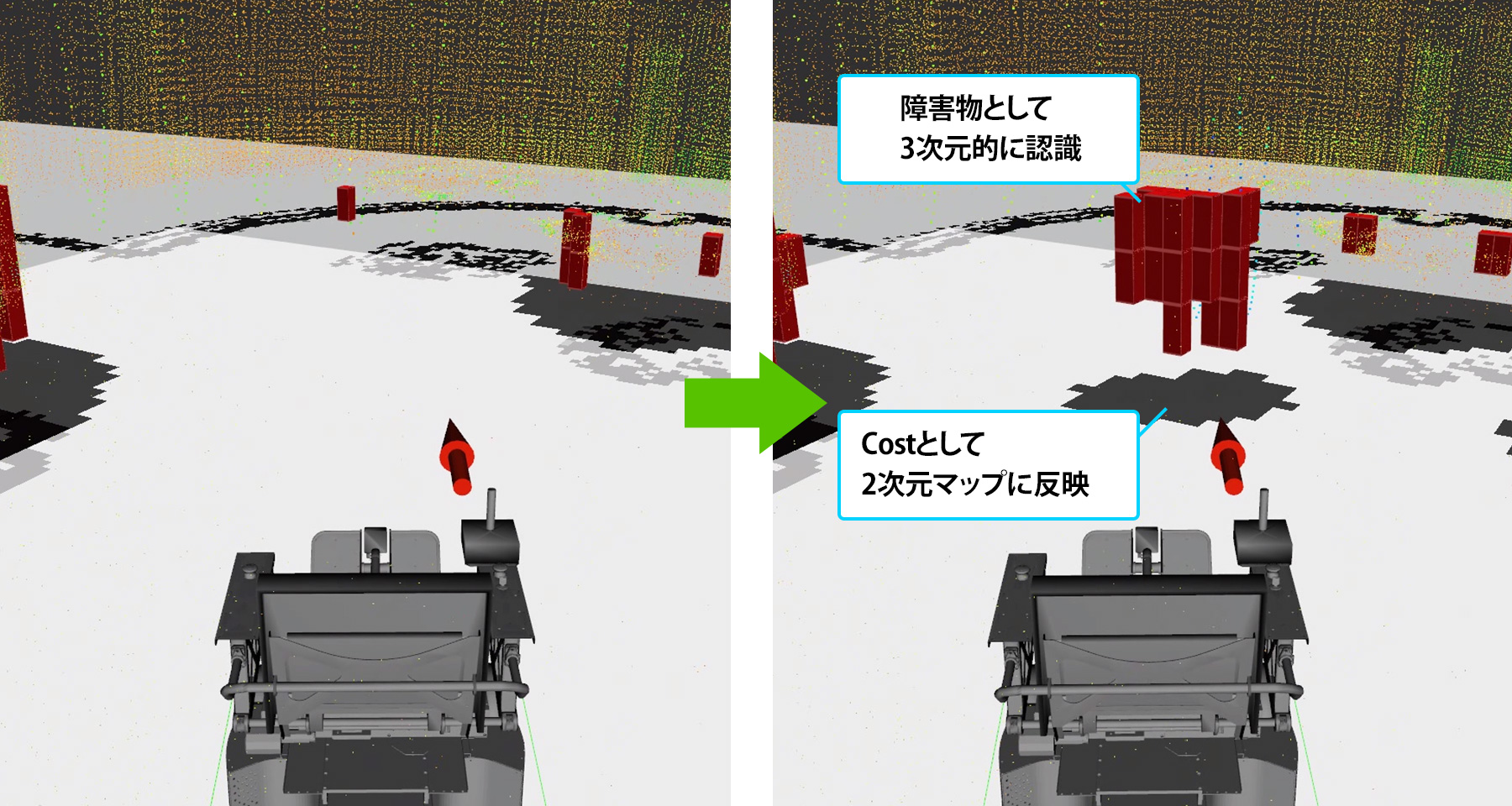
左:障害物がない状態/右:PMVの前を人が横切っている状態
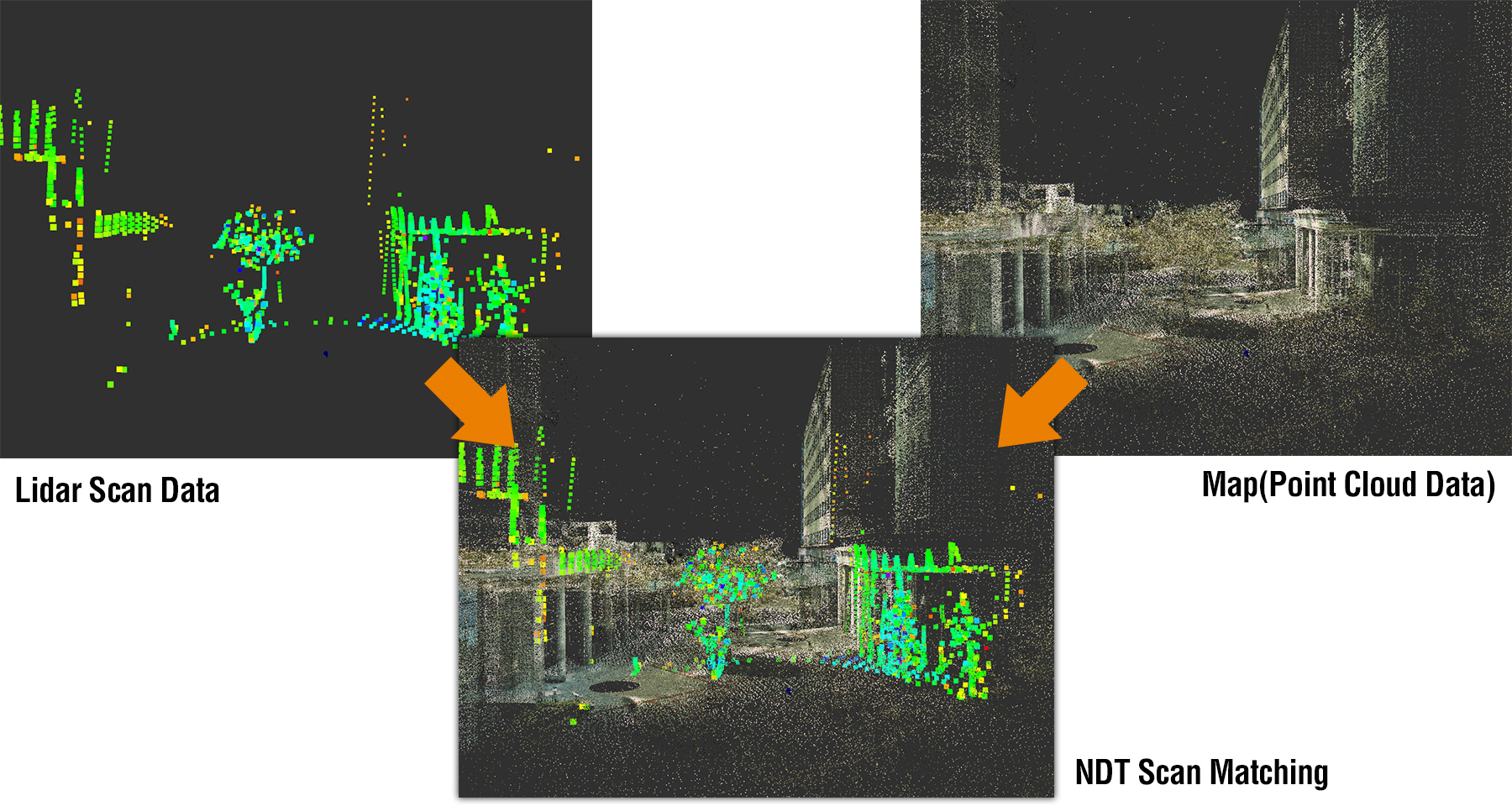
Localization
各種センサを用いて現在のロボットの位置や姿勢を推定する
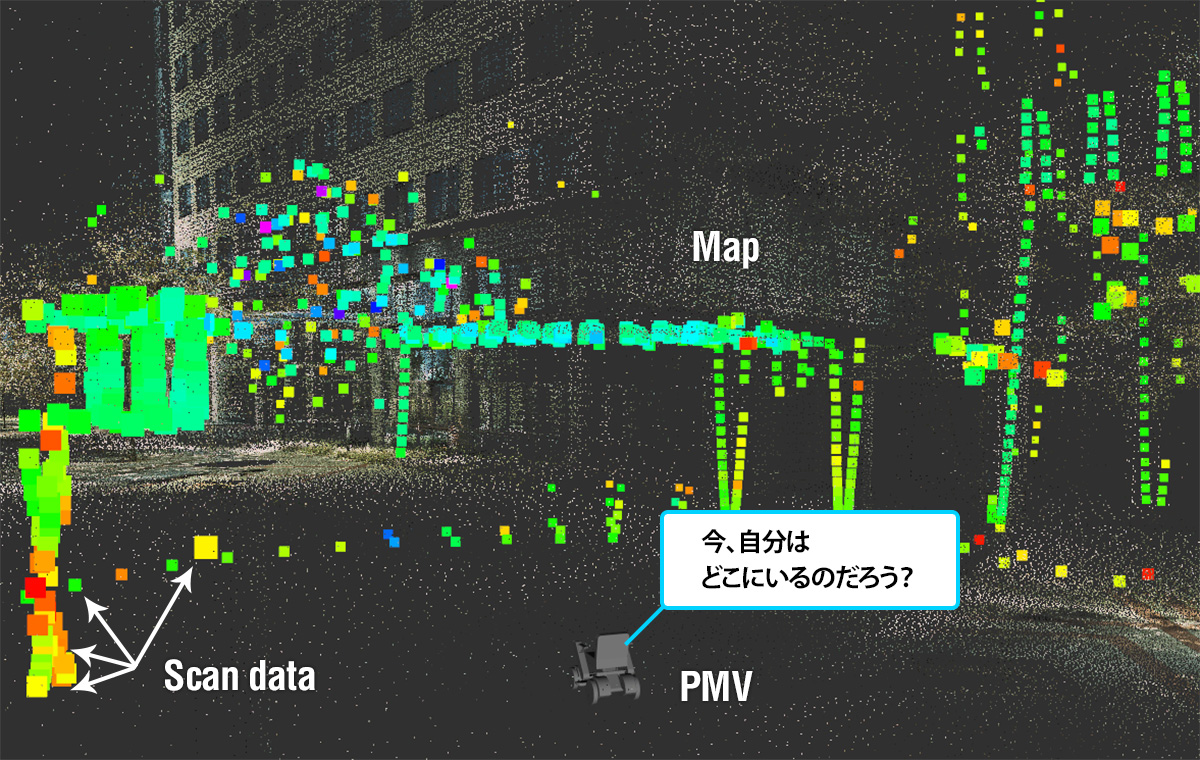
Localization
PType WAにおける自己位置推定手法:
3次元の点群データで構成された環境地図に対して、3D Lidarを用いて取得した点群データをNDTアルゴリズムを用いてマッチングする。
代表的な自己位置推定手法例
GNSS
(Global Navigation Satellite System)
【主なセンサ】
GPS・GNSS受信機
【利点】
地図が不要
【欠点】
屋内空間などの閉鎖空間では大きな誤差
衛星からの信号の受信情報に大きく影響