背景と目的
現在,VR など仮想空間を利用した多くのコンテンツが開発されており, さらにはスタンドアロン型のVRが普及し始めるなどXRコンテンツを容易に利用できる 環境が整いつつあります.普及に伴い,仮想空間において長距離を一瞬で移動するなど 実現不可能な現象が利用されています.XRコンテンツでは,ユーザに体験を提供する観点に おいて,没入感や臨場感という要素がとても重要なものとなっています.この没入感を 増加させるという問題に対しては,様々な方面からアプローチが行われています.
このような実現不可能な現象に従来の表現をそのまま利用してしまうとユーザに与える没入感や臨場感 が損なわれる可能性があります.
そこで,本研究では,仮想空間でのユーザの目の届かない遠く離れた場所へ一瞬で移動する現 象に焦点を当て,身体的な動作と仮想空間特有の表現を利用した長距離での空間移動表現を提案 します.本手法では,ユーザの身体的な動きをシステムの操作に利用することで「仮想空間への没 入感」や,手で円を描くことで別空間につながる穴を生成することで移動先の空間と接続し,空 間移動中の表現を行うことで「遠く離れた別の場所に移動した感覚」の向上を目指します.
システムの概要
本システムは,仮想空間においてユーザの身体的動作を利用したシステムの操作 遠く離れた場所にテレポート移動を行うシステムです.ユーザはVR機器を装着し, 仮想空間ではユーザの手と任意の場所の風景をユーザに提示します.位置合わせを 行った手を元にユーザの動作を認識を行い,ユーザの手で円を描く動作を認識す ることで空間移動を行います.
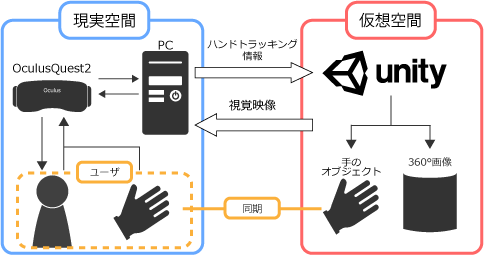 |
| 図1. システム構成 |
|---|
(1) ユーザの視界
ユーザの視界を図2(a)に示します.ユーザの周囲に画像を配置する(図2(b))ことで 任意の場所の風景をユーザに提示しています.
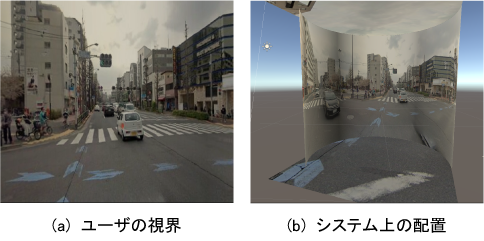 |
| 図2. ユーザの視界 |
|---|
(2) ユーザの動作認識
この機能はユーザの手の動作を認識するものとなっています. 動作認識時のユーザの視界と第三者から見たユーザの様子を図3に示します. 動作の認識は「手の形の認識」と「動作の認識」の二つを行うことで実現しています. 手の形の認識ではユーザの指の関節が曲がっているかの確認を各指で行うことで手の形を認識しています. 動作の認識は特定の手形中の右手の人差し指の指先を位置座標を取得して行っています.今回は認識する 特定の手形は右手の人差し指のみを伸ばす形で認識する動作は手で円を描く動作になっています.
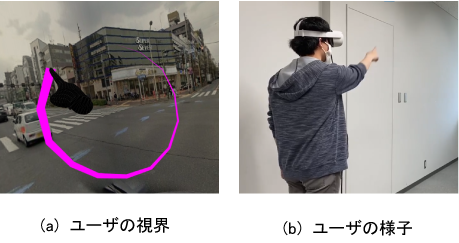 |
| 図3. 動作認識の様子 |
|---|
(3) 空間移動の表現
ユーザの円を描く動作を認識すると空間移動の表現が開始します. 空間移動の流れが図4となります. 動作を認識すると空間に穴が出現し(図4(a)),その後ユーザが穴に手を 触れます(図4(b)).触れた後にユーザは穴に飲み込まれ(図4(c)),別空間を中継したのちに 移動を完了させます(図4(d)).
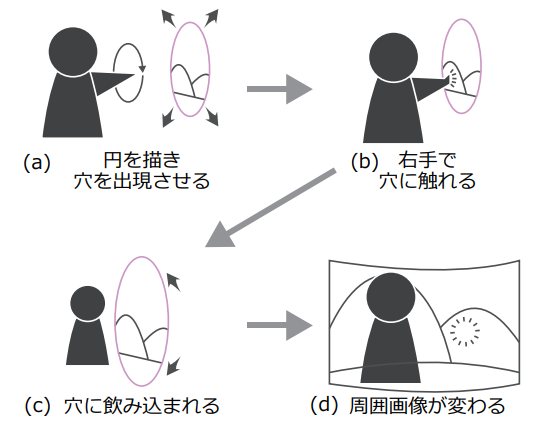 |
| 図4. 空間移動の流れ |
|---|
デモムービー
このシステムは仮想空間における長距離の空間移動をする際に利用することができます.
動画1に,システム利用時のユーザの視点の映像を示します.
| 動画 1. デモ映像 |
|---|
口頭発表
- 石丸敬登,吉野孝:仮想空間における空間移動表現の提案,2021年度情報処理学会関西支部 支部大会,B-06,pp.1–3(2021).
- 石丸敬登,吉野孝:仮想空間における長距離の空間移動表現,第115回GN研究会,GN115-12, pp.1–7(2022).
連絡先
- 石丸 敬登 : s236015[at].wakayama-u.ac.jp
- 吉野 孝 : yoshino[at].wakayama-u.ac.jp