Overview:
Robotic soccer is a new common
task for artificial intelligence
(AI) and robotics research. The robotic soccer provides a good
testbed for evaluation of various theories, algorithms, and agent
architectures.
We're
interested in the following research issues :
-
Behavior learning algorithm
-
Adaptive vision system
-
Multiple Omni-vision sensing system
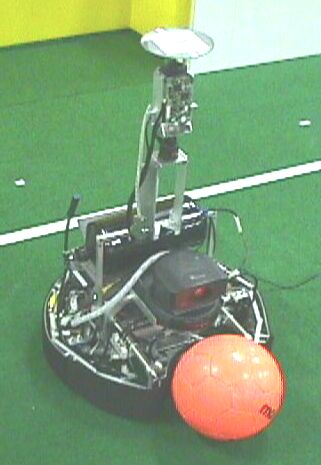
Our robot:
We
constructed a lightweight mobile robot with visual, tactile sensors, TCP/IP
communication device, and portable PC (Toshiba Libretto100) where Linux
is running.



References:
Takayuki
Nakamura and et. al,
Development
of A Cheap On-board Vision Mobile Robot for Robotic Soccer Research,
Proc.
of IROS'98, pp.431--436, 1998
Behavior learning algorithm for mobile robot:
Reinforcement
learning has been receiving increased attention as a method with little
or no a priori knowledge and higher
capability of reactive and adaptive behaviors through interactions
between the physical agent and its environment. The common reinforcement
learning method like a Q-learning, normally needs well-defined
quantized state and action spacesto
converge. This makes it difficult to be applied to real robot tasks because
of poor quantization of state and action spaces. Even if it can be applied
to real robot tasks, performance of robot behavior is not smooth, but jerky
due to quantized action commands such as forward, left turn and so on.
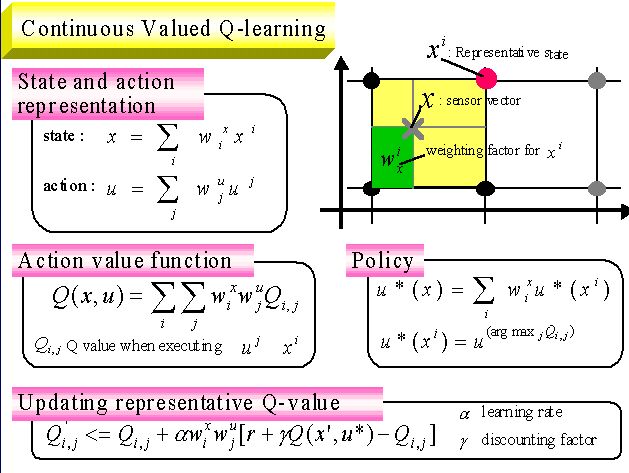
To deal with this problem,
we proposed a continuous valued Q-learning (hereafter, called CVQ-learning)
for real robot applications. This method utilized a function approximation
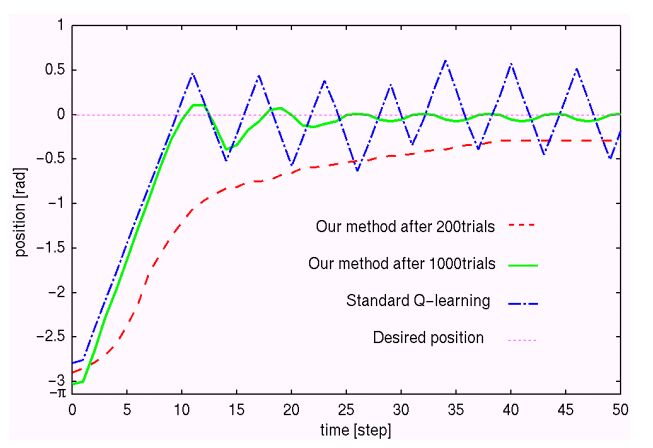
method for representing a action value function. In this work, we point
out that this type of learning method potentially has a discontinuity problem
of optimal actions given a state. To resolve this problem, we also proposed
a method for estimating where discontinuity of optimal action takes place
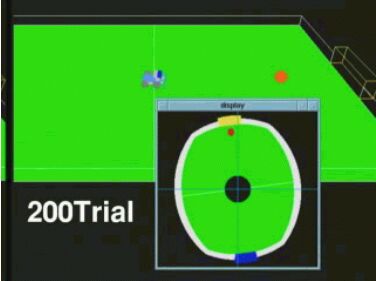
and for refining a state space for CVQ-learning. To show the validity of
our method, we apply the method to a vision-guided mobile robot of which
task is to chase the ball. Although the task is simple, the performance
is quite impressive.
References:
M. Takeda,
T. Nakamura, M. Imai, T. Ogasawara and M. Asada,
Enhanced
Continuous Valued Q-learning for Real Autonomous Robots,
Proc.
of Int. Conf. of The Society for Adaptive Behavior 2000,
pp.195--202,
2000.
Adaptive vision system:
Robust
visual tracking is indispensable for building up vision-based robotic system.
The hard problem in visual tracking is performing fast and reliable matching
of the target every frames. A variety of tracking techniques and
algorithms have been developed.
Among them, color-based image segmentation
and tracking algorithm seems to be practical and robust in real world,
because color is comparatively insensitive to the presence of changes in
scene geometry and occlusion.
Most of existing mTakayukiethods
need bootstrap process to model sample color distribution for image
segmentation. That is, in order to calibrate their statistical model
for image segmentation, these visual tracking systems need to wait for
color data to accumulate enough even if these systems work in dynamic environment.
In order to keep visual tracking systems running in real environment,
on-line learning method for acquiring some models for image segmentation
should be developed.
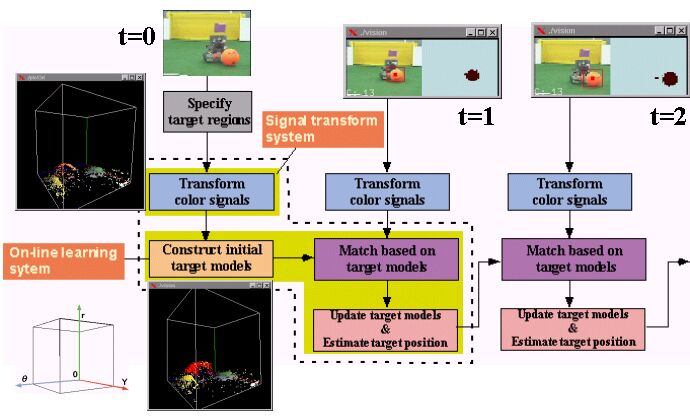
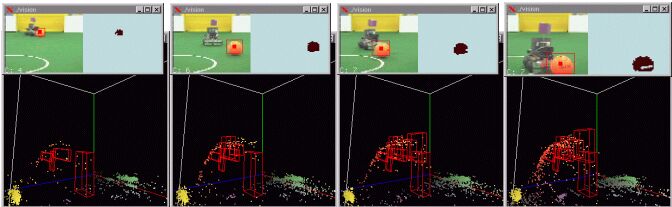
We developped an on-line
visual learning method for color image segmentation and object tracking
in dynamic environment. Such on-line visual learning method is indispensable
for realizing a vision-based system which can keep running in real world.
To realize on-line learning, our
method utilizes fuzzy ART model which is a kind of neural network for competitive
learning. Although color image we deal with is represented by YUV
color
space, YUV
space is not suitable for inputs of fuzzy ART model.
For this reason,
YUV space is transformed to a certain color
space. This transformation enables fuzzy ART model to segment color image
in on-line. As a result, even if surroundings such as lighting condition
changes, our on-line visual learning method can perform color image segmentation
and object tracking correctly.
References:
Takayuki
Nakamura and Tsukasa Ogasawara,
On-Line
Visual Learning Method for Color Image Segmentation and Object Tracking,
Proc.
of IROS'99, pp.222--228, 1999.
Multiple Omni-vision system:
In
order that multiple robots operate successfully in cooperative way,
such robots must be able to localize themselves and to know where other
robots are in a dynamic environment. Furthermore, such estimation should
be done in real-time. An accurate localization method is a key technology
for successful accomplishment of tasks in cooperative way. Since robots
in the multiple robot system can share the observations by communicating
each other, each robot in such multiple robots can utilize redundant information
for localizing itself. Therefore, such robots can solve the localization
problem more easily than a single robot does. On the other hand, in multiple
robot system, it is difficult to identify other robots by using only visual
information.
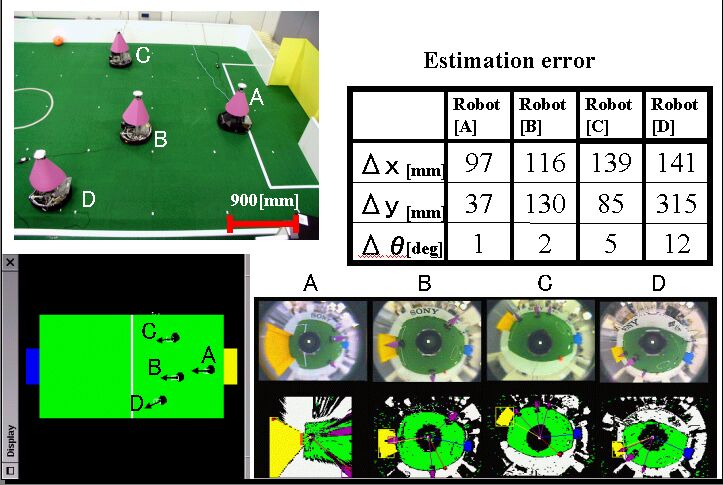
We developped a new method
for estimating spatial configuration between multiple robots in the environment
using omnidirectional vision sensors. Even if there was an obstacle in
the environment where the multiple robots were located, our method could
estimate absolute configuration between robots in the environment with
high accuracy.
Our method is based on identifying
potential triangles among any three robots using the simple triangle constraint.
In this work, in order to enhance functions of autonomous decentralized
system, our method gives a self-localization capability to a single robot
among multiple robots, in addition to capability of estimating a relative
configuration from the sharing observation. Due to this self-localization
capability, our method can use one more constraint which is called "enumeration
constraint." This constraint drastically eliminates impossible triangles
and makes our algorithm fast and robust.
After potential triangles are identified,
they are sequentially verified using information from neighboring triangles.
Finally, our method reconstructs absolute configuration between multiple
robots in the environment using the knowledge of landmarks.
References:
T. Nakamura,
A. Ebina, T. Ogasawara and H. Ishiguro,
Real-time
Estimating Spatial Configuration between Multiple Robots by Triangle and
Enumeration Constraints,
Proc.
of IROS 2000, pp.2048--2054, 2000 .
T. Nakamura, M. Oohara, T. Ogasawara and H. Ishiguro,
Fast self-localization method for mobile robots using multiple omnidirectional
vision sensors.
Machine Vision and Applications, Vol.14, No.2, pp.129--138, 2003.