
背景
様々なニーズに対応するため,ロボット開発の期間の短縮が求められている.これに伴い様々な開発ツールが利用できるようになった.
ここでは,その中でMobile Robot Programming Toolkit (MRPT)を用いて自律ナビゲーションシステムを構築してみる.
システム構成図
2次元距離データに基づく地図生成(ICPアルゴリズム使用)
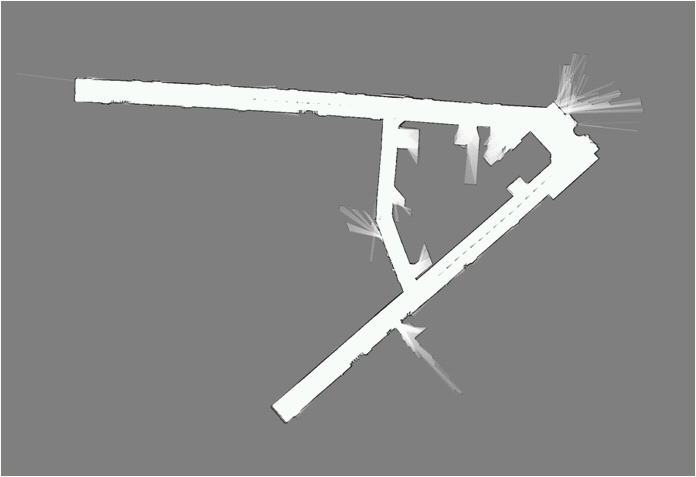
生成された和歌山大学システム工学部A棟5階の地図
DP法に基づく経路計画
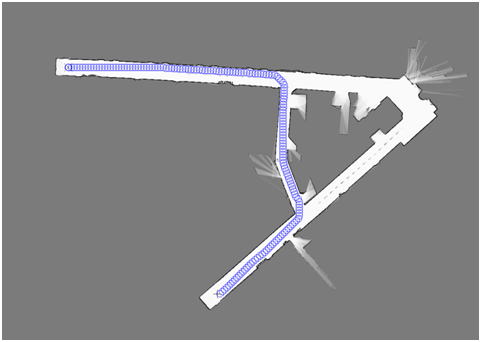
上述の地図上での経路計画の例
パーティクルフィルタ法に基づく自己位置同定
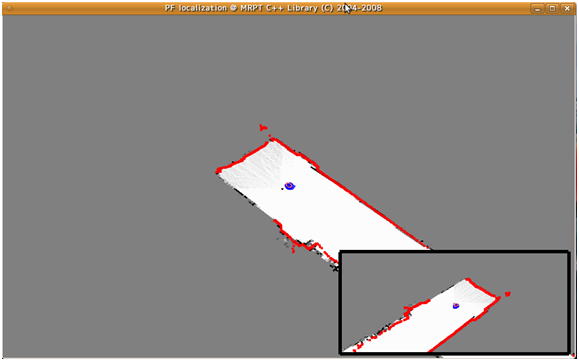
上述の地図上での自己位置同定の例
赤の点群は,ある時刻におけるレーザーレンジファインダによる計測点群,青の点群は,その時刻において
パーティクルフィルタで推定したロボットの位置を表している.
経路追従走行
応用事例
参考文献
![]()