制約条件付き最小2乗法に基づくロバストな
局所スキャンマッチング法
背景
- 測域センサを用いた高精度・高速な環境地図構築技術の開発
原理と特徴
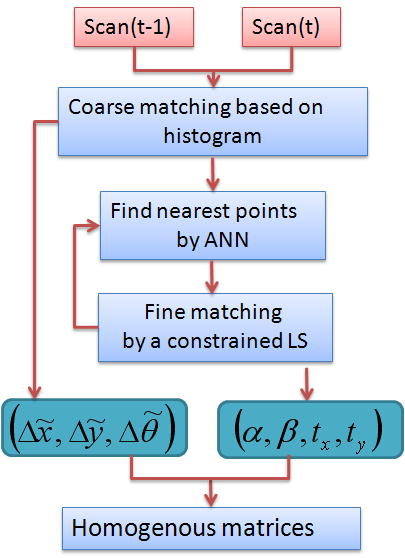
- 粗密戦略を用いてスキャンマッチング
⇒ 高速化
制約条件つきの最小2乗法を用いた計算
⇒ 高速化
点ー線対応
⇒ 高精度化
アルゴリズムの概要
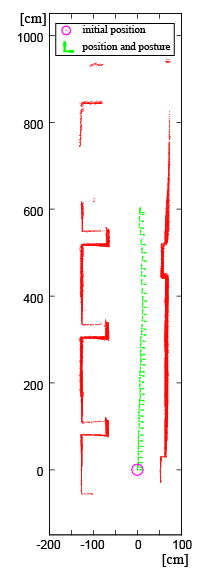
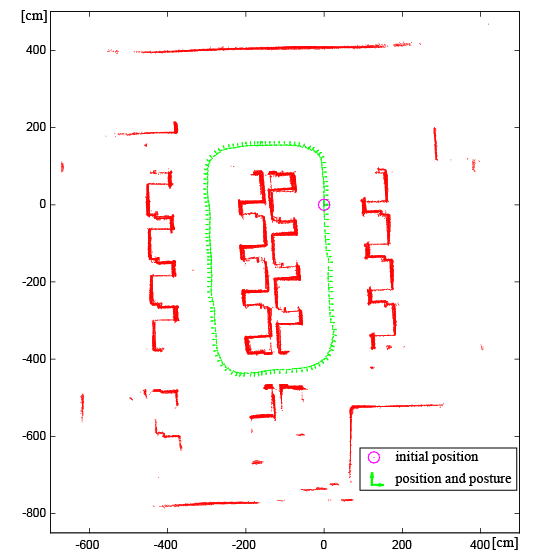
結果
応用事例
- 屋内案内ロボット
- 屋内警備ロボット
- お掃除ロボット
参考文献
- 中村恭之 ”制約条件付き最小2乗法に基づく高速な局所型スキャンマッチング法”,
日本ロボット学会誌,Vol.28,No.5,pp.648-657,2010.
- 中村恭之, 前田幸宏: 高速なスキャンマッチングのための粗密戦略法の提案,
ロボティクス・メカトロニクス講演会‘08, 2P2-C12, 2008.
- 武野哲也, 中村恭之, 和田俊和: 測域センサデータの直線追跡に基づく局所環境地図生成法,
ロボティクス・メカトロニクス講演会'07,2P1-G05, 2007.