視覚による物体追跡技術は,監視システム,HCI,ロボティクスの必須の技術である.
本研究では,画像内で指定された対象を3次元空間内で安定に追跡する方法を開発する.
システム構成図
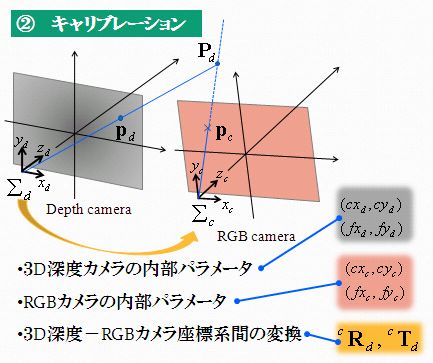
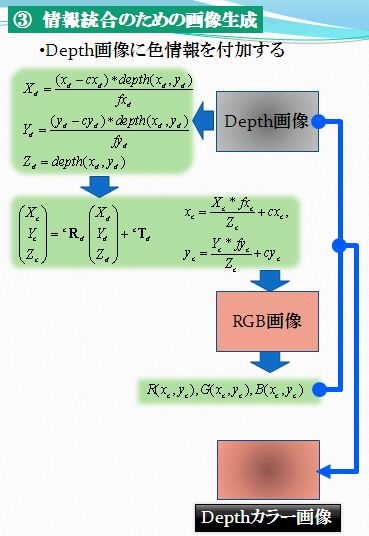
方法
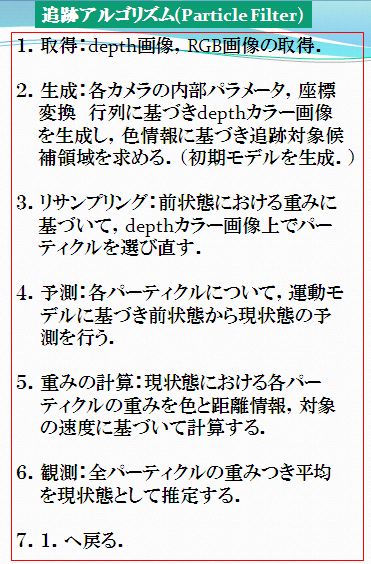
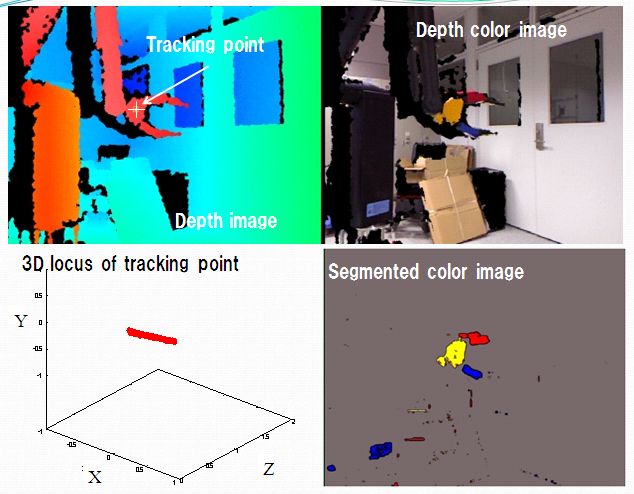
3次元距離情報と色情報を統合してパーティクルフィルタを用いて対象物体を追跡する.

追跡結果
処理時間: 100msec/frame パーティクル数: 200個 CPU: Core2Duo P8800 Memory: 4Gbyte OS: Ubuntu10.04LTS
Kinectを用いた3次元追跡に関する研究
背景
視覚による物体追跡技術は,監視システム,HCI,ロボティクスの必須の技術である.
本研究では,画像内で指定された対象を3次元空間内で安定に追跡する方法を開発する.
システム構成図
方法
3次元距離情報と色情報を統合してパーティクルフィルタを用いて対象物体を追跡する.
追跡結果
処理時間: 100msec/frame
パーティクル数: 200個
CPU: Core2Duo P8800
Memory: 4Gbyte
OS: Ubuntu10.04LTS
![]()