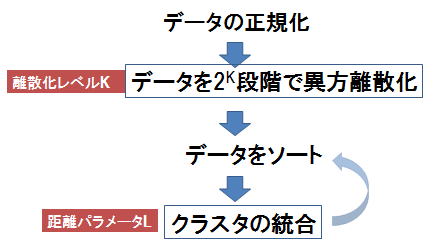
Hetero-BOOLアルゴリズムの流れ
背景
視覚による物体検出と領域分割処理は,サービスロボットやホームセキュリティシステム,認識システムなどの知的システムには欠かせない機能である.とりわけ,サービスロボットに必須であると考えられる.なぜなら,サービスロボットが多くの日常的な物体を操作するためには,そのような物体を頑健に認識する必要がある.
この研究では,RGB-D カメラにより取得される3次元の距離データや多次元データから重要な部分を切り出すという根本的な問題に
取り組む.
従来法の問題点
物体を表現している3次元距離データや多変量データを頑健に領域分割するアルゴリズムとして,様々なものが提案されてきた.
などが提案されている.
K-means, Fuzzy C-means法は,理論的に特徴空間内で超楕円体状に分布するクラスタを推定することしかできないため,どのような多次元データにも頑健であるわけではない.
Euclidean Cluster Extraction法は,平面,超球状に分布するデータを仮定しているため,先述の2つの方法と同様に,どのような多次元データにも頑健であるわけではない.
提案する解決策
な,高速なクラスタリング手法BOOL[Sugiyama11]を利用することを提案する.
M. Sugiyama and A. Yamamoto:
“A Fast and Flexible Clustering Algorithm Using Binary Discretization,” in Proc. of IEEE 11th Int. Conf. on Data Mining, pp.1212-1217, 2011.
ただし,オリジナルのBOOLのアルゴリズムのままでは,領域分割が過多になる傾向があるため,これを改良した
アルゴリズムとして
Hetero-BOOLアルゴリズム
を新たに提案する.
という改良を加え,BOOLの過多な分割の解消と高速性を維持している.
Hetero-BOOLアルゴリズムの流れ
処理結果の比較例
の4つの手法で比較.
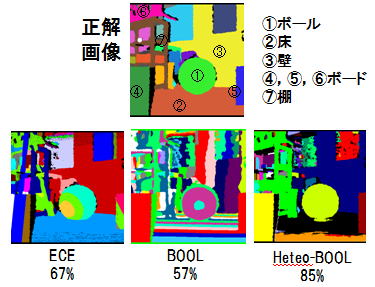
3次元(x,y,depth)データによる分割結果の比較
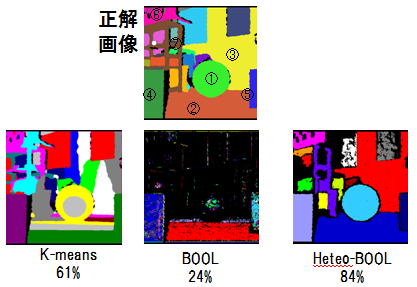
6次元(x,y,depth,nx,ny,nz)データによる分割結果の比較
使用機器
応用事例
など多様なビジョンベースロボットの物体認識機能に応用が可能.
参考文献
研究指導
本研究に興味があり,試してみたい方は,中村 (ntakayuk@sys.wakayama-u.ac.jp)までメールで御連絡下さい.
![]()