背景
自律型移動ロボット普及のためには,自動的な環境地図構築技術が必要不可欠である.この環境地図構築法には,正確な地図が高速かつロバストに構築でき,さらに,環境の動的な変化に対応するために地図を正確に更新できることが望まれる.地図を更新するためには,大域的に自己位置を推定する技術が必要となる.
大域的自己位置推定では,ロボットの初期の位置姿勢を与えずに,地図全域でロボットの位置姿勢を推定しなければならない.
この研究では,データの欠損や変化があっても環境中から不変な個所を探索し安定して大域的自己位置推定できるように,2Dスキャンデータから合同変換に不変な特徴量を生成するという根本的な問題に取り組む.
従来法の問題点
これまでにも,幾つかの大域的自己位置推定法が提案されているが,
- 比較的長い直線で構成される環境にしか適用できないもの
- 環境内の少数の顕著な特徴点のみを用いるためにノイズやオクルージョンなどによる特徴点の欠落に弱いもの
- 処理の頑健性を向上させるために処理するデータ量が多く,調整しなければならないパラメータが多いもの
などが提案されている.
提案する解決策
- 曲線分を多く含むような一般的な環境で使用可能で
- するデータ量が少なく
- 調整しなければならないパラメータが少ない
という特徴を持つ合同変換に不変な特徴量を提案し,さらに,これを用いて大域的自己位置推定を行う.
新たな不変特徴量の詳細は...(公表前にて後日公開予定)
処理結果の例
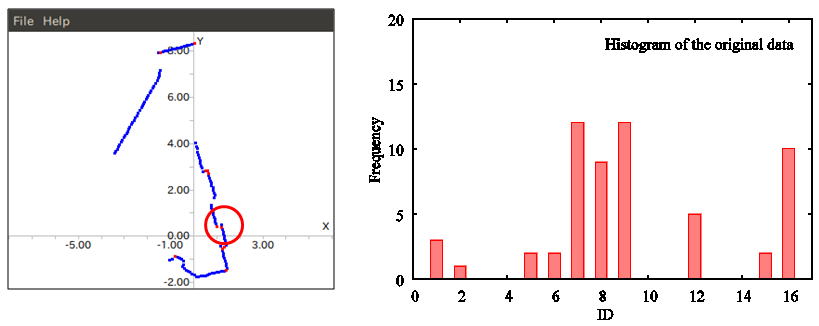
2Dスキャンデータのある点(赤丸内)における提案する特徴量データ(ヒストグラム)
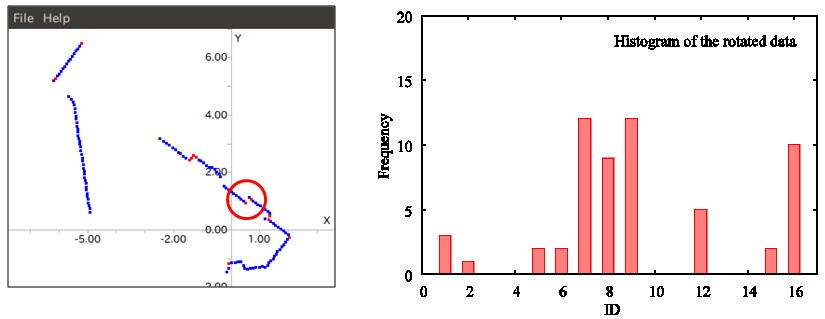
40度回転させた2Dスキャンデータの同一点(赤丸内)における提案する特徴量データ(ヒストグラム)

研究室内の雑多な環境で2Dスキャンデータを取得
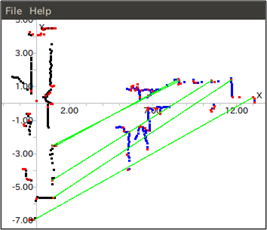
2Dスキャンデータを取得時の環境状態が異なる2つのスキャンデータ間での対応点探索結果
提案する特徴記述子を用いると,スキャンデータの一部に新たなデータが加えられるような状況や,オクルージョンによってスキャンデータの一部が隠されているような状況においても,対応点探索に成功する.
使用機器
- SICK 社製レーザーレンジファインダ(LMS100:視野270 °,角度分解能0.25 °)
- Laptop PC(CPU:Corei7-2620M, Memory:8GB)
応用事例
など多様なレーザーレンジファインダを搭載する移動ロボットに応用が可能.
参考文献
- 田下 裕一,中村 恭之:”ロバストなスキャンマッチングのための合同変換に不変な特徴量(CIF)の提案,”
ロボティクス・メカトロニクス講演会‘13, 1A2-H10, 2013.
- 脇田翔平,中村恭之:”合同変換に不変な特徴量(CIF)とキーポイント間の幾何学的拘束に基づいたロバストなスキャンマッチング法の提案,”
ロボティクス・メカトロニクス講演会‘14,2A2-T05,2014.
- 中村恭之,脇田翔平:”2Dスキャンデータの合同変換に不変な特徴量(CIF)を用いたスキャンマッチング,”
第19回ロボティクスシンポジア,6C3, pp.592--598,2014.
- 中村恭之,脇田翔平:”2Dスキャンデータの合同変換に不変な特徴量(CIF)を用いたロバストなスキャンマッチング,”
日本ロボット学会学術講演会2013, (3J1-02), 2013.
- Takayuki Nakamura, Yuuichi Tashita:” Congruence Transformation Invariant Feature Descriptor for Robust 2D Scan Matching, ”
Proceedings of 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC), SYS-10, 2013.
- T. Nakamura and S. Wakita:”Robust global scan matching method using congruence
transformation invariant feature descriptors and a geometric constraint
between keypoints, ”
Proceedings of 2014 IEEE International Conference on Systems, Man and Cybernetics
(SMC), pp.3103-3108, 5-8 Oct. 2014.
研究指導
本研究に興味があり,試してみたい方は,中村 (ntakayuk@sys.wakayama-u.ac.jp)までメールで御連絡下さい.
