背景
一人乗り電気自動車(以後,PMVと記す)は,不整地走破性の高い脚車輪型で,車輪と脚の二種類の移動機構を同時に備えており,それらの組み合わせによって高い環境適応能力を持つ.しかし,事前に想定されていない状況に陥った場合は,逆に可能な行動の組み合わせが多すぎて,ランダムに試行して脱出する方法では脱出に時間を要したり,スタックして走行不能となることがある.事前に,様々な状況に対応できるような車輪と脚の行動の組合せを生成することは非常に難しい.
そこで,本研究課題では,平坦な道路,起伏の大きな段差や数段の階段といったPMVの様々な走行状況に適した動作手順(車輪と脚の行動の組合せの生成)を自動学習する手法を開発することを目標とする.
提案する解決策
- 1. PMVの周囲環境を三次元レーザースキャナ(以後,3D Lidarと記す)によりセンシングし,計測された三次元データによる周囲環境の把握手法
- 2. 平坦な道路,起伏の大きな段差や数段の階段といったPMVの様々な走行状況に適した動作手順(車輪と脚の行動の組合せの生成)を自動学習する手法
本研究では,これら2つの手法を開発することを目的とした.
周囲環境の把握手法
疎な三次元データ(三次元点群データ)から,より密な三次元点群データを生成するために,点群データをそのまま入力可能で,性能が高いと評される手法として,PU-GAN (a Point Cloud Upsampling Adversarial Network)という手法がコンピュータビジョン分野における著名な国際会議で2019年に発表された.これを用いることで,密な三次元点群データを生成することが可能であるという見通しを得た.
PU-GANを実装し,シミュレーション環境(ROS上のgazebo)で大量のLidarデータを生成して,学習させた.その結果,疎な三次元データ(三次元点群データ)から,より密な三次元点群データを生成することが可能になった.
PMVの動作の自動学習手法
動作手順を自動学習する手法に関しては,深層強化学習アルゴリズム (A2C)を用いて,シミュレーション環境中でPMVを再現したロボットを用いて,平坦な環境で目的地に到達する動作,1段の段差のある環境で段差乗り越え動作を自動学習できるという見通しを得た.
処理結果の例
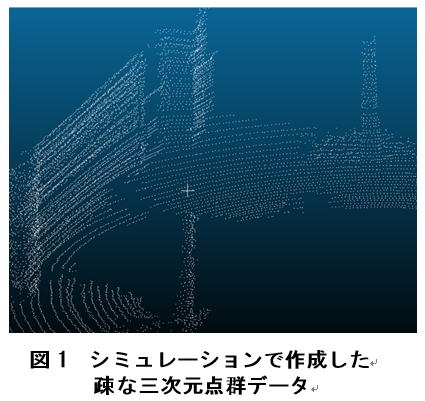
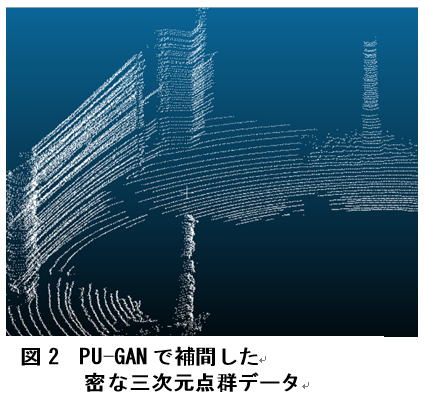
- 図1は,シミュレーションにより生成した疎な三次元点群データであり,図2は,そのデータをPU-GANを用いて密な三次元点群データを生成した結果である.3D Lidarのスキャンによる縞模様はあるものの,生成された点群のデータ数は増加している.今後の課題は,縞模様が見えなくなるような点群データをアップサンプリングする方法を開発することである.
- A2Cアルゴリズムにおける状態空間,行動空間は次のように設定した.状態空間は,ロボットと目標までのx,y軸距離,ロボットのpitch・roll角,各車輪の速度,ステアリング軸の角度(2自由度),ロール軸の傾き(2自由度),スライド軸の値(2自由度),各車輪のセンサの値(12自由度)により表現されており,合計で23次元ある.
行動空間は,静止,前進,後退,前後ステアリング軸の角度(4自由度),前後ロール軸の傾き(4自由度),椅子の前後左右スライド軸の正・負の移動量(4自由度)により表現されており,合計で15次元ある.強化学習における報酬は,ロボットと目標の位置の差を表す距離にマイナスを掛けた値に設定している.
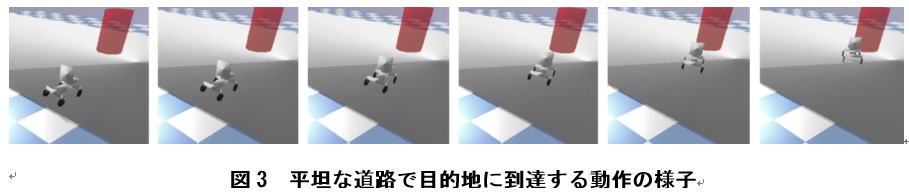
- 図3は,平坦な道路で目的地まで到達する動作手順をA2Cアルゴリズムにより自動学習した結果を表している.この図で,赤い物体は目的地を表している.4つの車輪の向きや速度を調整して目的地に到達していることが分かる.
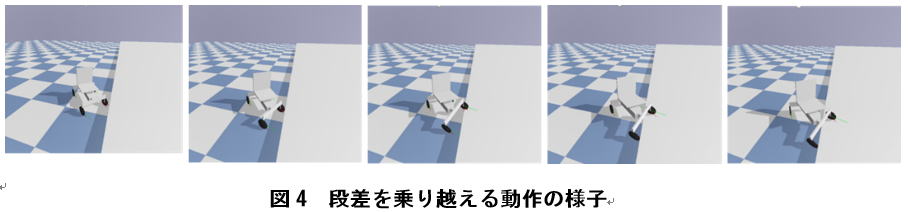
- 図4は,一つの段差を乗り越える動作をA2Cアルゴリズムにより自動学習した結果を表している.この図から,車輪に取り付けたレーザーセンサにより段差を感知し,ステアリング軸を変化させて車輪を持ち上げて,段差を乗り越える動作が獲得できていることが分かる.
今後の展開
- 現在の実装では,段差を乗り越えた後に,ロボット後部の車輪のステアリング軸の角度が元に戻らず,段差を乗り越えた後も車輪が地面が浮いたままの状態になることがある.従って,ロボットが平坦な道路にいることを認識することができれば,車輪を地面に接地して移動する動作を取ることができると考えられる.このような改良を加えることが今後の課題の一つである.
使用機器
- PMV
- Velodyne VLP-16-HiRes
- GPU
- NVIDIA Jetson AGX Xavier
応用事例
参考文献
- シェライス ミカエル:進化計算問題に対する能動的回避学習法に関する研究,和歌山大学大学院システム工学研究科 2017年度修士論文
- 今村 大介:SRGAN を用いた Lidar データの補間に関する研究,和歌山大学システム工学部知能情報学メジャー 2018年度卒業論文
- 古田 智樹:倒立振り子型移動ロボットの行動獲得のための深層強化学習法の性能比較,和歌山大学システム工学部知能情報学メジャー 2018年度卒業論文
- 脇田翔平,中村恭之,八谷大岳:”LaserVAE による特徴量生成とその特徴量に基づいた大域自己位置推定”,計測自動制御学会論文集 Vol.
55,No. 7, pp.476-483, 2019.
研究指導
本研究に興味があり,試してみたい方は,中村 (ntakayuk@sys.wakayama-u.ac.jp)までメールで御連絡下さい.
