RT-Moversの最新情報をお届けします!
RT-Moverの活動状況や近況など日々の活動等を随時ご報告させていただきます。
クリックして詳細を御覧いただけます。
皆様
サイバスロン2020大会が終わりました.大会概要,参加までの道のり,大会結果などについての報告会を開催します.
各チームメンバーにより解説を行い,大会を振り返ります.
ちょっとした裏話なども含めながらの報告会ですので,お気軽にご参加ください.
日時:2020年12月22日(火)17:30〜19:00
方式:オンライン方式(Zoom)
主催:和歌山大学
費用:無料
参加登録方法:事前参加申し込みが必要です.詳細は 別紙 をご覧ください.
主な内容:
・サイバスロン2020大会に関する概要説明
・大会走行を振り返って
・ソフトウエア開発を振り返って
・ハードウエア開発を振り返って
〇開会挨拶
・惠下隆(理事(研究・産学連携)・副学長)
〇閉会挨拶
・宗森純(システム工学部長)
〇発表者
・中嶋秀朗(システム工学部教授)
・守田昌功(紀州車椅子サービス有限会社代表取締役)
・前田孝次朗(博士後期課程2年)
・小杉哲平(博士前期課程2年)
・澤田真(博士前期課程2年)
皆様
ご支援いただきありがとうございます.
昨日サイバスロン2020が行われまして,その内容がライブストリーミングで世界に放映されました.
我々のチームは世界4位となりました.
世界に対して,和歌山大学RT-Moversの理念や技術力を情報発信することができたと思います.
これも皆様のご支援のおかげです.
今後は報告書などをまとめ,クラウドファンディングでご支援いただいた方へのリターンの送付や,報告会の開催を行う予定です.
リターンの送付は1?1.5か月程度後に,報告会(オンライン)は年内開催を目標に準備をします.報告会(オンライン)の案内はリターンの送付時にも同封にてお伝えします.
RT-Moversを応援していただきましてありがとうございました.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
ご支援いただいている皆様へ
RT-Moversをご支援いただき,ありがとうございます.
大会に向けたスケジュールでご報告しております通り,大会出場に向けた重要なイベントの一つとして,メディカルチェックがあります.
10月21日(水)に無事終了することができましたので,ご報告いたします.
今回,和歌山県立医科大学 上條義一郎先生にご協力いただき,スイスの大会本部と和歌山をネットワークでつなぎ,オンライン面談の形で行われました.
パイロットの出場資格や健康状態が確認されました.
各種チェックも無事に完了し,大会での走行に全力で臨みます.
引き続きのRT-Moversへの応援をよろしくお願いいたします.
<関連ホームページ>
和歌山県立医科大学 げんき開発研究所
(http://www.wakayama-med.ac.jp/med/miraic/genki/)
和歌山県立医科大学 げんき開発研究所 スタッフ紹介ページ
(https://wakayama-med-miraic.com/genki/36-2/)
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
ご支援いただいている皆様へ
現在,ヨーロッパは新型コロナウイルスへの感染者の数が第一波と比較できないほど急激に増加しています.スイスも同様な状況です.
そのため,大会事務局から以下のような連絡がありましたので,ご報告します.
・11月13日(金)予選,14日(土)決勝とし,世界各地で同時に走行させる予定だったが,大会事務局スペースの人数制限などにより,世界同時走行に対応するのが難しくなった.
・そのため,13日以前に各チームの走行を世界各地の会場で実施し,事前に記録しておく.RT-Moversの走行日は11月7日(土).
・競技内容,大会設備,会場設備などは今まで通りで,走行日の日程だけ分散させる.
・サイバスロン大会2020は予定通りの日程で行う.
11月13日(金)はブレイン・コンピュータ・インターフェース,義手,FESバイクの3種目,
14日(土)は電動車いす,義足,エクソスケルトンの3種目についてサイバスロン放送プログラムを製作し,ストリーミング配信する形とする.
その時まで事前に走行した記録は非公開としておき,13日,14日の大会放映日に結果発表となる.
*スイスの現地時間で13日,14日であるため,日本時間にすると日付が変わる場合があります.
我々のチームとしては,競技走行や会場設営,大会運営の内容は変わりませんが,走行日が予定より早まりました.
ご支援いただいている皆様には,13日(金),14日(土)のサイバスロン2020大会放映,特に14日(土)の電動車いす部門をストリーミング映像でご覧いただきながら,
応援をよろしくお願いいたします.
〇大会放映スケジュール予定(大会事務局の都合により変更もあり得ます)
・ストリーミング(インターネット)サイトには以下から入ってください
(https://cybathlon.ethz.ch/en/)
以下はいずれもスイス時間.ただし( )内は日本時間.
〇Friday, 13 November 2020 (日本時間11月14日)
Brain-Computer Interface Race: 16:00-17:00
(ブレイン・コンピュータ・インターフェース部門 日本時間14日午前0:00-1:00)
Arm Prosthesis Race: 17:00-18:00
(義手部門 日本時間14日午前1:00-2:00)
Functional Electrical Stimulation Bike Race: 18:00-19:00
(FESバイク部門 日本時間14日午前2:00-3:00)
Inside CYBATHLON ? Stories, recap and outlook: 19:00-20:00
(サイバスロン インサイド,ストーリー 日本時間14日午前3:00-4:00)
〇Saturday, 14 November (日本時間11月14日?15日)
Wheelchair Race: 13:00-14:00
(電動車いす部門 日本時間14日21:00-22:00)
Leg Prosthesis Race: 14:00-15:00
(義足部門 日本時間14日22:00-23:00)
Exoskeleton Race: 15:00-16:00
(エクソスケルトン部門 日本時間14日23:00-24:00)
Inside CYBATHLON Stories, recap and outlook: 16:00-17:00
(サイバスロン インサイド,ストーリー 日本時間15日午前0:00-1:00)
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
小杉です.
RT-Moversをご支援いただきまして,ありがとうございます.
“通信テストセッション”を11月4日に行い,中継用映像システムや,スコアリングシステムの通信チェックをサイバスロン事務局と行いました.
当日は,チーム(和歌山大学),中嶋(チームリーダー,スイス)と大会事務局(スイス)をネットワークでつなぎ, 中継用通信の確認や,競技のタイム計測システムの確認を行いました
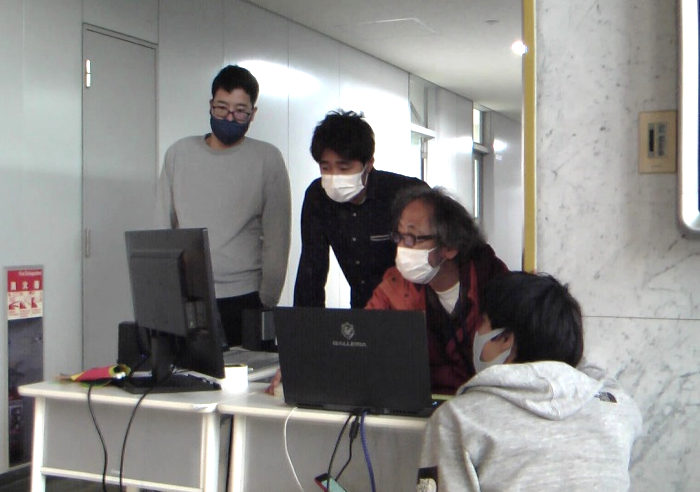
競技会のスタートまでのカウントダウンやストリーミング用の映像を確認することで,いよいよ大会本番が迫ってきていると感じさせられ,一層気が引き締まっています.
今後ともRT-Moversの応援をよろしくお願いいたします.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
小杉です.
RT-Moversをご支援いただきまして,ありがとうございます.
“テクニカルチェック”が11月2日にありましたので,その様子について報告します.
当日は,チーム(和歌山大学),中嶋(スイス)と大会事務局(スイス)をネットワークでつなぎ, テレビ電話を通して安全性の確認を行いました.

非常時にパイロットが機体を停止できるか,機体に鋭くとがった部分がないかなどを確認した後,機体の動作の安全面,レギュレーションの確認を行いました.
その後,研究室内にタスクを配置し,すべてのタスクを走行させました.パイロットの操作の習熟度についても確認がされました.

大会事務局とのやり取りの後,無事に審査を通過することができました.
チーム全員が心を一つに一丸となって最後まで戦っています.
今後ともご支援,応援のほどよろしくお願いいたします.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
前田です.
RT-Moversをご支援いただきまして,まことにありがとうございます.
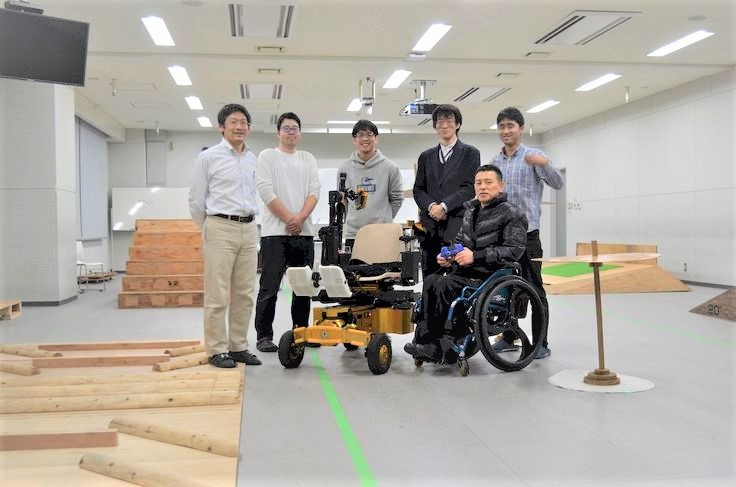
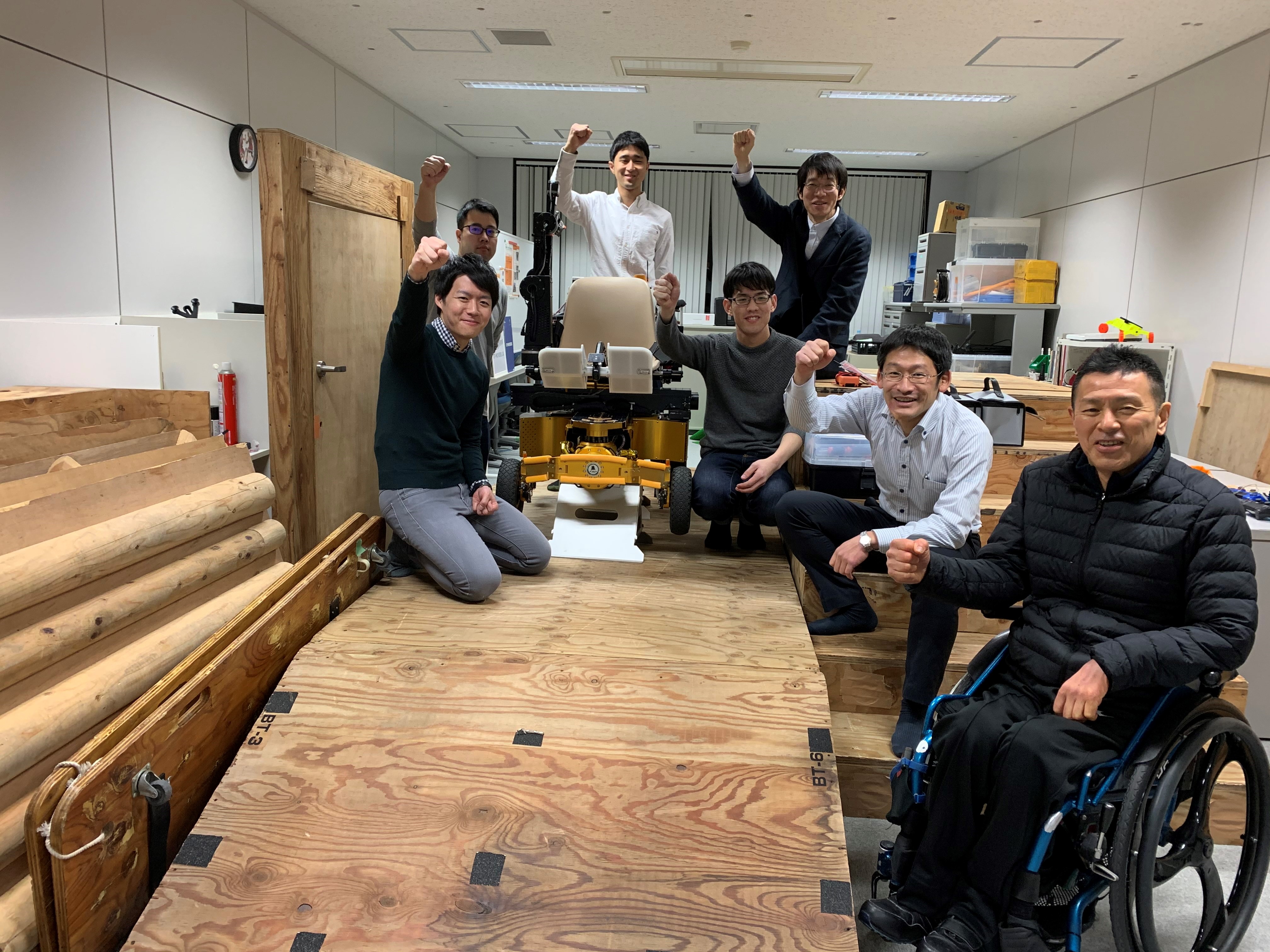
先日の「サイバスロン2020のスケジュールについて」のなかで触れた“会場運営などのリハーサルも含めた総合搭乗練習(和歌山大学会場)”を10月31日に行いましたので
その様子について報告します.
本番と同様に全てのタスクを設営して練習を行いました.

全てのタスクを練習することができ,大会本番に向けて最終段階にある今,チームとしてどこを詰めていくのかを確認することができ有意義な練習となりました.
また,レフェリーやタイムキーパーも大会当日と同じように実施し,本番さながらの緊張感を持って練習しました.

最終段階ですので,チームが一丸となって本番まで走っていきます!
次は11月2日のテックチェックです.
今後ともご支援,応援のほどよろしくお願いいたします.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
RT-Moversを応援、ご支援頂いている皆様へ
RT-Moversをご支援いただきまして,まことにありがとうございます.
大会に向けてスケジュールが見えてきましたのでご報告します(まだ最終確定ではありません).
〇メディカルチェック:10月21日(水)
パイロットの出場資格,健康状態を確認するメディカルチェックが,スイスの大会本部と和歌山をネットワークでつなぎ行われる.
〇会場運営などのリハーサルも含めた総合搭乗練習(和歌山大学会場):10月31日(土)
和歌山大学会場の運営を滞りなく行うために,会場設営及び大会スケジュールに沿った運営リハーサルを会場運営スタッフで行う.パイロットの試走も行い,最終レベルの確認を行う.スイスにいる中嶋と和歌山会場をネットワークでつなぎ,ネットワーク状況やスムーズな大会運営方法なども確認する.
〇テクニカルチェック:11月2日(月)
実際のタスクを走行させて,機体の安全性の確認,パイロットの操作習熟度 を確認する.大会本部と和歌山をネットワークでつなぎ行われる.
〇大会日程
予選:11月13日(金)17:30頃?19:30頃の中で数回走行.その中の一番よい記録が予選の記録となる.
決勝:11月14日(土)21:30頃?24:30頃の中で6種目全て(私たちは電動車いす種目)の決勝が行われる
大会当日の競技の様子は,サイバスロン大会事務局がストリーム配信しますので,そちらをご覧いただき,応援いただけますと幸いです.各チームの状況など含めた大会全体の情報になります.大会事務局からストリーミング配信についての詳細情報がまだ発表されておりませんが,以下のサイバスロンの公式ページには掲載されると思います.
(https://cybathlon.ethz.ch/en/)
〇この他に,レフェリー,タイムキーパなどの大会オフィシャルスタッフとのやり取りや使用機器の確認なども今後行います(日程調整中).大会当日は,チームメンバー,レフェリ,タイムキーパ(和歌山会場),中嶋(スイス),大会事務局(スイス)という入り組んだ状況になるため,各種事前準備が必要になります.
今後ともご支援のほどよろしくお願いいたします.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
RT-Moversを応援、ご支援頂いている皆様へ
以前お伝えしましたように,当初5月2日,3日にスイスで開催予定だった「サイバスロン2020」大会が,新型コロナウイルスの影響により9月に延期となりました.
しかし,コロナウイルスの影響が収まらず,9月に延期となった大会が11月に再延期となりました.
11月に再延期となった「サイバスロン2020」は,その開催方式も以下のように大きく変更となり,本日,サイバスロンの公式HPでアナウンスされました.
(https://cybathlon.ethz.ch/en/cybathlon-2020.html)
・開催日:11月13日(金)予選,14日(土)決勝
・開催方式:世界各地で(分散して)競技を開催,情報をオンラインにて統合(スイス)する方式.出場する場合には,各チームがそれぞれの機関にてコースを準備して,そこで競技を行う.
・大会の様子は,サイバスロン大会公式インターネット中継にてご観戦いただけます.
・時間など詳細は時差の関係もあり調整中(確定後,チームのホームページ(本サイト)などでお伝えします)
RT-Movers HP: https://web.wakayama-u.ac.jp/sys/cybathlon/
コロナウイルスの影響で多くのイベントが中止となる中ですが,細心の注意を払いつつも,前向きに向き合おうと考えており,我々のチームは参加をあきらめません.
また,チーム全体が海外遠征することはなくなりましたが,新しい方式での大会参加であるため,コースタスクの製作や会場準備,大会運営などへの対応が新たに必要になりました.
そのため,皆様から頂いたご支援は,新しい方式での大会参加に必要な諸経費に使わせていただきたいです.なにとぞご理解くださるようお願いします.
現在のチーム状況ですが,チームリーダの中嶋は3月(渡航制限のかかる直前)からスイスで在外研究を実施しており(当初の予定では4月下旬にチームがスイスに来て合流),
現状の日本の水際対策によって日本に帰国することもかなわない状況です.
そのため,日本にいる他のチームメンバーとオンラインで打ち合わせを行いながら,チーム全体として大会準備を行うというチャレンジングな状況下にあります.
パイロットの練習は新たに練習用シミュレータを開発し,それを用いています.チームメンバーの学生も,各自意義を見出しながら準備に励んでおり,皆さんのご支援に報いるよう奮闘しています.
今後ともご支援のほどよろしくお願いいたします.
RT-Movers 中嶋 秀朗,守田 昌功,菊地 邦友,前田 孝次朗,小杉 哲平,澤田 真
皆様,プロジェクトへのご支援,誠にありがとうございます.
5月2日,3日に開催予定でありましたサイバスロン2020大会が,新型コロナウィルスの影響により,9月に延期となることが昨日3月10日付で発表されました.
現在は,下記の日程での開催が予定されております.
・シンポジウム:9月17日
・登録,テクニカルチェック(技術確認),メディカルチェック(医療確認):9月17日,18日
・サイバスロン大会:9月19日,20日
私どものプロジェクトとしては,大会延期に対応し,9月に出場する方向で準備を行います.
皆様のご期待に応えられるよう,研究開発スケジュール等を見直し対応するつもりですので,引き続きの応援をどうぞよろしくお願い申し上げます.
また,今回の大会延期にともない,6月配送予定としておりましたリターン,および6月開催予定としておりました報告会につきましては,
大会終了後の10月あるいは11月に対応させていただくことになります.
誠に申し訳ございませんが事情ご高配いただきたく,よろしくお願いいたします.
<関連情報ホームページ>
「CYBATHLON HP」
https://cybathlon.ethz.ch/en/
「CYBATHLON YouTube ch」
https://www.youtube.com/channel/UCqGx-eUykZLDKjjrwRhfilQ
1月14日よりスタートいたしました和歌山大学サイバスロンプロジェクトチーム「RT-Movers」のクラウドファンディングの挑戦が、2月28日 をもちまして無事に終了いたしました。
86名もの多くの皆様からの多大なご支援により、目標額を大きく超える額(目標額の170%)にて、達成することができました。関係者一同、ここに厚く、厚く御礼申し上げます。
和歌山大学初のクラウドファンディングということもあり、開始前は正直なところ、成立するのかどうか不安に感じることもございました。
しかしながら、開始直後に多くの方々にご支援いただくとともに、日々頂戴する温かいメッセージを拝見し、大変勇気を頂戴いたしました。
加えて、今回のプロジェクトの目的であるCybathlon 2020での目標達成への取り組みに加え、四車輪型支援移動機器「RT-Moverシリーズ」の理念にもご共感いただけたこと、大変感謝しております。

皆様のご支援を活用させていただき、しっかりと成果を残せるように、着実に、そして継続的に、関係者一同一丸となって、準備をすすめてまいりたいと考えております。
今後も、プロジェクトのホームページ等を通しまして、我々の活動の一端をご報告させていただきます。
また、各種リターンにつきまして,時期になりましたら該当する皆様にお知らせいたします。楽しみにお待ちいただけましたらと存じます。
まずは、これまでの皆様からのご支援に感謝申し上げます。
今後とも引き続きの応援をどうぞよろしくお願い申し上げます。
<関連情報ホームページ>
クラウドファンディングページ
READYFOR株式会社「目指せ世界の頂上!障害者アスリートの祭典 サイバスロン」
皆様、ご支援いただき、ありがとうございます。
今回は、2月6日に行いましたメディアの方々を対象とした公開練習について、ご報告します。
多くの方々にお越しいただき、注目度、期待の大きさを改めて実感することができ、大変光栄に思いました。
本番の大会に向けて、ますますモチベーション高く、準備を進めることができます。
当日は、はじめに、プロジェクトリーダの中嶋教授が、
Cybathlonの概要説明
RT-Moversの特徴、これまでの軌跡
本番に向けてのスケジュール
などについて、説明をしました。

その後、実際にRT-Mover PType WA MK-IIを用いて、各タスクの実演を行いました。
機体のスピード感、ダイナミックさだけでなく、各タスクに対する完成度についてお伝えできたと思います!

最後は,メディアの皆さんからの質問タイムでした。中嶋教授だけでなく、各チームメンバも取材を受けました。
とても緊張しましたが、いろいろな議論、意見交換を行うことができました。大変貴重で、実りのあるいい機会となりました。

早速、地元マスコミの皆さまにも、さまざまご紹介いただいております。ありがとうございます!
今後とも引き続きの応援をどうぞよろしくお願い申し上げます。
<関連情報ホームページ>
「ニュース和歌山; 電動車いすで目指す世界一」
https://www.nwn.jp/news/200201_rt/
皆様からのご支援、感謝申し上げます。
1月31日にNHK和歌山で放送された「ギュギュっと和歌山」の生中継コーナーに出演しました.
当日は、CybathlonとRT-Moversの取り組みを紹介し、ラフテラインと階段の2つのタスクを披露しました。
失敗が許されない生中継は、ある意味で本番と同じ。準備をしっかりと行い臨みました。(下の写真はリハーサル時の一幕です!)


そして生中継開始!18時半の放送開始のラフテラインタスク、18時40分からの生中継コーナーでの階段タスク、いずれもパイロットの守田さんと機体が融合した動きとなりました。
実際に機体が動く様子が放映され、Cybathlonと私たちチームの取り組みを知っていただくよい機会となりました.
今後もチームメンバー一丸となって、目標達成に向けて取り組んでまいります。
引き続きのご支援、どうぞよろしくお願いいたします。
 皆様、いつもご支援いただき、ありがとうございます!
皆様、いつもご支援いただき、ありがとうございます!
明日1月31日(金) 18:30から放送予定のNHK和歌山放送局「ギュギュっと和歌山」で、
私たちRT-Moversをご紹介いただくことになりました。
「駿吾がおじゃまします」というコーナー内で、「四輪車いすで世界を!」というタイトルでの生中継があります。パイロットの守田さん,チームメンバーが出演させていただきます。
もちろん、練習の様子や機体の「実際の動き」もご覧いただけるよう、準備をすすめています。
本プロジェクトに興味を持っていただいている皆様はもちろん、「Cybathlonって、どんな感じだろう?」と思っている皆様にとりましても、私たちのプロジェクトをご理解いただくことのできるとても良い機会と思っています。
時間は、18時半?59分の生中継コーナー内の6分程度です。今からとても緊張していますが、よりよい中継となるよう、チーム一丸となって全力で挑戦します!
ぜひご覧ください!
<関連情報ホームページ>
「NHK和歌山放送局 ギュギュっと和歌山」
https://www4.nhk.or.jp/P5671/
「ギュギュっと和歌山 ▽駿吾がおじゃまします?四輪車いすで世界を!」
https://www4.nhk.or.jp/P5671/x/2020-01-31/21/37184/8200204/
皆さまの温かいご支援、ありがとうございます,
これまでサイバスロンのタスクをご紹介してきたこちらの記事、今回で最終回となります。6番目の注目タスク、ランプ & ドアついてご紹介します。
電動車いすレースのタスクは,全部で以下の6種類です.
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
【ランプ&ドア】
ランプ & ドアは、下の図のように、スロープと、ドアが設置された平坦道から構成されています。他のタスクと同様、普段の生活環境ではありふれたシチュエーションですよね。
このような登り坂でも下り坂でもない、片流れという路面は、普段の日常環境の中に意外に多くあります。
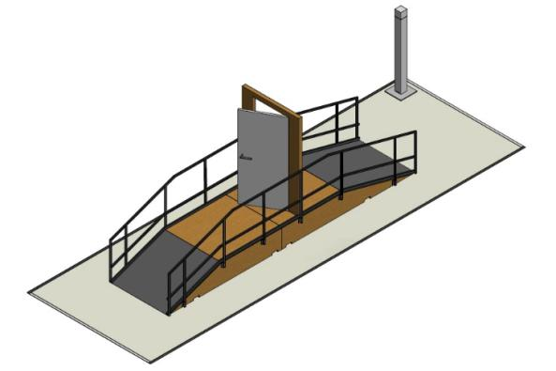

このタスクでは、まず約20度の上り坂を登ります。これだけですと、大したことがないように思われるかもしれません。しかしながら、その後に、ドアが待ち構えています。
このドア、前回2016年大会では、パイロットが手で開け閉めできました。しかし、今回2020年大会から、電動車いすに搭載されているロボットアームをパイロットが操縦して、ドアの開け閉めを行わなければなりません。しかも、コースの横には手すりがあり、この手すりを超えての操作もできません。さらに、ロボットアームを操作してもよい領域も制限されています。
このため、機体をコースの適切な位置に移動させ、狭い領域でスムーズにドアの開け閉めを行うことができるように、いろいろな技術を開発し、工夫を凝らしています。ドアを開けた後は、当然、機体を操縦し、ドアを通り抜けなければなりません。
そして、次に待ち受けるのが、ドアを閉めなければならないこと。、ドアを開ければ、閉めるということは、当たり前の風景ですが、車いすで、しかもロボットアームを駆使して行うことは、非常にエキサイティングなシーンとなること、間違いなしです。
ドアを閉めたら、あとは、スロープを全力で駆け抜け、ゴールを目指します。

ドアノブを掴む、回す、ドアを開ける、というありふれた行為を、ロボットアームを使ってミスなく行うことは、なかなかにチャレンジングな研究開発項目でした。
もちろん、機体の性能も重要ですが、パイロットの繊細な操作技術も必要不可欠です.このため、現在は簡単操作で、確実に、スピーディーにタスクを攻略できるように、改良をすすめています。
これまでご紹介しましたように、目標達成に向けて、日夜邁進しております。皆様からのご期待、ご支援が、原動力となっています。
引き続きの皆様のご支援、どうぞよろしくお願いいたします。
皆さまの温かいご支援、ありがとうございます,
これまでご紹介してきましたサイバスロン2020 競技コースのご紹介、残り2回となりました。
電動車いすレースのタスクは,全部で以下の6種類です.
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
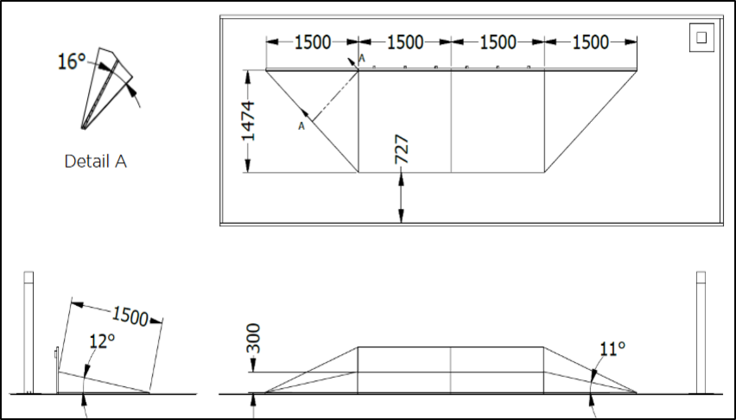
今回は、「ステアーズ」の次のタスクである「ティルテッド パス」をご紹介します.
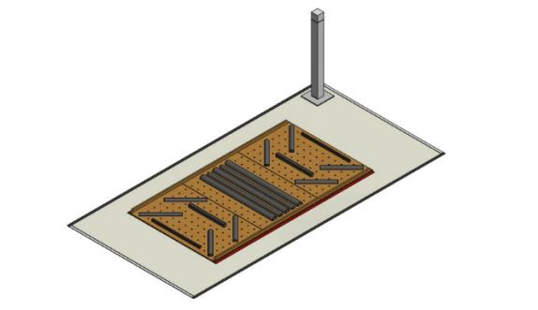
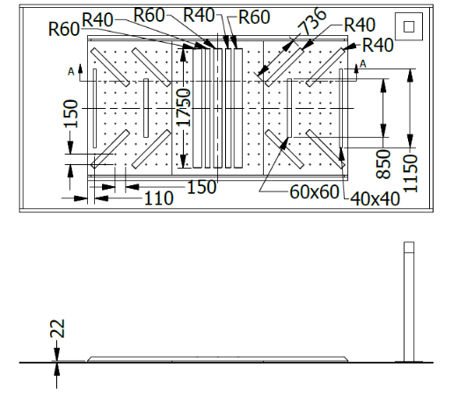
【ティルテッドパス】
ティルテッド パスでは、下の図のような傾斜12度の傾斜したコースが設定されています。
このような登り坂でも下り坂でもない、片流れという路面は、普段の日常環境の中に意外に多くあります。
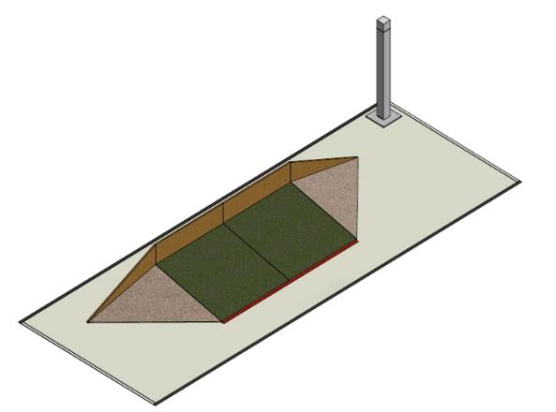
このコース、路面には人工芝が敷かれています。このため、平坦なアスファルトのような道よりも滑りやすくなっており、機体によっては傾斜を滑り降りていってしまいます。
そんな地形を走行している最中でも、私たちの機体はパイロットが座っている部分を水平に保つことができます。
このため、機体が傾いたとしても、パイロットは傾くことなく操作することができます。とてもスムーズで安定した走行が可能ですので、私たちの機体が得意とするタスクの1つです。
また、このとき、パイロットは路面が傾斜しているにも関わらず、常に水平な状況となりますので、まるで空を飛んでいるかのような少し不思議な感覚を体験できるそうです。

大会本番では、傾斜道を安定して、軽快に走行する様子をご覧いただけることでしょう.
次のタスク紹介では、最後のタスクである「ランプ & ドア」をご紹介します。お楽しみに!!
そのほか情報につきましては,チームのホームページでも随時発信しています.ぜひご覧ください.皆様の引き続きのご支援、どうぞよろしくお願いいたします。
皆さまの温かいご支援、ありがとうございます,
「サイバスロン2020 競技コースのご紹介」も,4回目となりました.ようやくコースの半分を過ぎたことになります.そして, 今回は, サイバスロン2020大会で一番注目していただきたいタスクである「ステアーズ」をご紹介します.
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
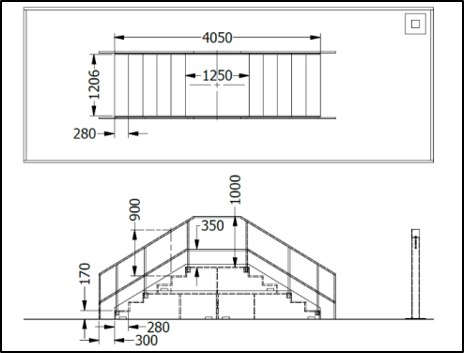
【ステアーズ】
ステアーズでは,一般的な車いすでは走行がむずかしい階段の上り下りをしなければなりません.しかも,その段数,6段!!前回2016年大会では3段でしたので,2倍の段数です.
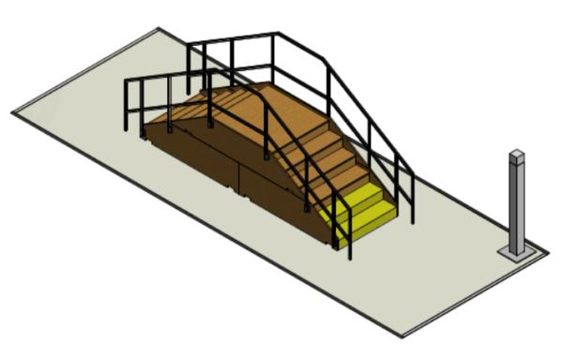
階段を登り下りしている最中は、手すりを使い機体を支えたり、持ち上げたりすることは、禁止されています。また、下り段差の最後の一段で、一度停止する必要もあります。
この停止は、機体が段差を転がり落ちるような動作にならないよう、安全に、適切に、機体のコントロールをしている証明にもなりますので、非常に重要な項目です。
一般的な電動車いすでは、階段の上り下りはできませんよね。このため、機体の開発段階から、階段を上り下りできる機体の研究開発を進めてきました。
その際に、どうしても譲れないことが、RT-Moverシリーズの特徴である、脚車輪機構です。
前回2016大会では、3段の階段でしたので、タスクをクリアする方法を見つけ、世界第4位になることができました。しかし、今回は前回の大会の倍の段数を上り下りしなければなりません。
当然、前回の機体のままでは、今回の6段の階段の上り下りはクリアできませんでした。
他のチームが採用しているものと同じような機構を選択し、階段の上り下りをさせることも当然可能です。
しかし、
(1) 段差や数段の階段も移動可能にする機構
(2) ロボティクスシステム
(3) 移動アルゴリズム
をもつものこそが、私たちの四車輪型支援移動機器「RT-Moverシリーズ」です。これまでのタスク同様、パイロットの座る姿勢も維持しようとする機構が働きますので、乗り心地も追及しています。
このため、特許を出願中の、ユニークな階段上り下り動作を研究開発することに成功しました。現在は、タスククリアタイムをさらに縮めることができるように、操作方法やアルゴリズムの改良に磨きをかけています。
大会本番では、ダイナミックに脚をあげて、階段を上り下りする私たちの機体をご覧いただけることと思います。ご期待ください。

次のタスク紹介では,5番目のタスクである「ティルテッド パス」をご紹介します.お楽しみに!!
そのほか情報につきましては,チームのホームページでも随時発信しています.ぜひご覧ください.皆様の引き続きのご支援、どうぞよろしくお願いいたします。
皆さまの温かいご支援、ありがとうございます,
「サイバスロン2020 競技コースのご紹介」の第3回となりました。ここで、コースもようやく半分。
今回は、「スラローム」の次のタスクである「ラフテライン」ついてご紹介します。
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
この記事では,テーブルの次のタスクであるスラロームについてご紹介します.
【ラフテライン】
ラフテラインは, 一般的な車いすでの走行はもちろん, 歩行でも難しいと思うような, デコボコ道を走り抜けるタスクです.
このタスクでは、大きさも形も異なる凹凸のあるデコボコ道を、
・いかに安定して
・いかに早く
駆け抜けるかが問われます.一方で,車体が,コース外れてしまったり,横に置かれているガイドの上に乗り上げてしまったりすると失格となり,ポイントは得られません.

みなさんが日常で体験されている、例えば自転車でデコボコ道を走っていることを想像してみてください。1秒でも早く通り抜けようと、スピードを上げていくと、大きく揺れて、前のめりになったり、横に振られたりと、こけそうになるなど、危険を感じられることがあると思います。
このタスクでも同じようなことがおきます。つまり、1秒でも早くクリアするために、機体のスピードを上げて走行する際、機体が大きく揺られてしまい、パイロット、ロボットアームなどの部品が振り落とされる可能性が高くなります。
このようなパイロットに負荷がかかる、あるいは機体の故障や破損の原因となるような危険な状況を生み出さないようにするために、私たちの機体には、機体自体を適切に制御し、デコボコ道でも走行可能な走行性能を持っています。加えて、パイロットの姿勢を維持し、快適な乗り心地を確保できるようにする機構ももっています。これが、「RT-Moverシリーズ」です。
もちろん、今回のタスクのように、1秒でも早くクリアすることが求められている状況では、高速移動している機体の平坦な路面にはない揺れが発生します。したがって、操作の難易度ももちろん上がります。このため、一見簡単に見える「ラフテライン」ですが、実は、パイロットの腕の見せ所でもあります。
大会本番では、パイロットの操作により私たちの機体が軽快に走行する様子をご覧いただけると思います。
次のタスク紹介では、4つ目のタスクである「ステアーズ」をご紹介します.お楽しみに!!
そのほか情報につきましては、チームのホームページでも随時発信しています。ぜひご覧ください。
皆様の引き続きのご支援、どうぞよろしくお願いいたします。
競技コースは,幅約3mの直線コースの中に,様々なタスクが配置されています.これらタスクをクリアすることで,点数が加算されていきます.
順位は,タスククリアにより獲得した点数の多い順となります.また,点数が同じ場合は,スタートからゴールするまでのタイムにより,順位づけされます.
このため、タスクをミスなくクリアする精密さと,いかに早くゴールするかという機体の性能,そしてパイロットが機体をいかに自分のものとして操作できるかというユーザビリティーが求められます.
電動車いすレースのタスクは,全部で以下の6種類です.
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
この記事では,テーブルの次のタスクであるスラロームについてご紹介します.
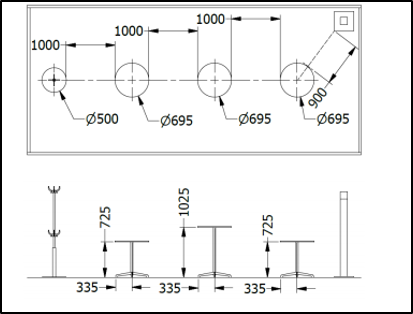
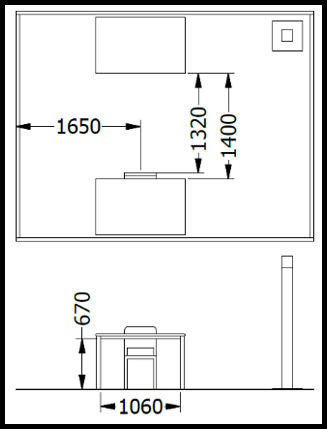
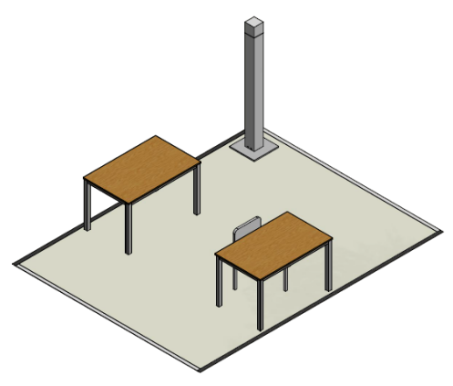
【スラローム】
スラロームでは,次のように障害物として、2つのポールと高さの違うテーブルが配置されています.
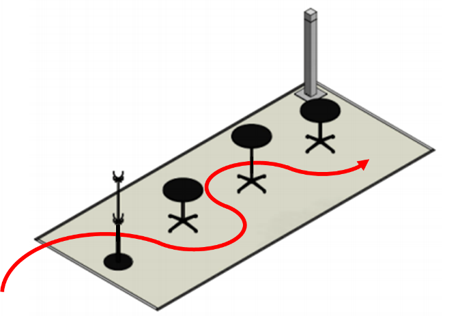
このステージでは,例えば下図の赤線のように、パイロットは機体を繊細に操作して,障害物と障害物の間をすり抜けるように走行しなければなりません.
この際に,障害物に機体が触れたり,機体がコースからでてしまったりすると失敗になり、得点がゼロとなってしまいます.
このタスクでは,正確な操作をいかにスピーディーにできるかが求められます.私たちの機体は,すべてのタスクをクリアできるように工夫を凝らした機体です.しかし,コースも簡単にクリアできるようには設定されてはいません.例えば,障害物の間隔と機体の幅は府ギリギリな部分もあります.このため,障害物に当たらないように,あるいはコースからはみ出してしまわないようにコースをクリアするには,機体を高度に制御する技術とともに,ミスなく完璧に攻略できるルート(つまり,必勝ルート!)を見つけ出し、走行する技術も必要です。
順位を決める際には、クリアタイムも重要です.このため,パイロットはいかに早く,いかにスムーズに着席するか,慎重かつ大胆に機体を操作します.このタスクでは、機体のスムーズな動きとともに,機体と障害物が接近しすぎて,テーブルなどを動かして芦敗とならないかという微妙な位置関係にドキドキしながら,観戦いただけることと思います.
このように,機体スピードを維持しつつ,必勝ルート通りに走行するかが,このタスクが成功するかどうかのポイントになります.
このため,現在は,必勝コース通りに走行するための練習を重ねています.
大会本番では,スムーズに、スピーディーに機体が旋回していく雄姿をお楽しみいただけると思います.

次のタスク紹介では,3つ目のタスクである「ラフテライン」をご紹介します.お楽しみに!!
そのほか情報につきましては,チームのホームページでも随時発信しています.ぜひご覧ください.皆様の引き続きのご支援、どうぞよろしくお願いいたします。
競技コースは,幅約3mの直線コースの中に,様々なタスクが配置されています.これらタスクをクリアすることで,点数が加算されていきます.
順位は,タスククリアにより獲得した点数の多い順となります.また,点数が同じ場合は,スタートからゴールするまでのタイムにより,順位づけされます.
このため、タスクをミスなくクリアする精密さと,いかに早くゴールするかという機体の性能,そしてパイロットが機体をいかに自分のものとして操作できるかというユーザビリティーが求められます.
電動車いすレースのタスクは,全部で以下の6種類です.
(1) テーブル
テーブルに問題なく着席できるかを競います
(2) スラローム
障害物の間を期待がいかにスムーズにすり抜けることができるかを競います.
(3) ラフテライン
デコボコ道を,いかに安定し,素早く通過できるかを競います.
(4) ステアーズ
6段の階段をスムーズに上り下りできるかを競います.
(5) ティルテッド パス
片流れの路面(傾斜)を安定して通過できるかを競います.
(6) ランプ & ドア
スロープを登り,ドアをロボットハンドで開け閉めするとともに,機体がドアを通り抜けることができるかを競います.
 今回は,最初のタスクとなる「テーブル (Table)」についてご紹介します.
今回は,最初のタスクとなる「テーブル (Table)」についてご紹介します.
【テーブル】
テーブルでは,次のように,テーブルや障害物が配置されています.
このステージでは,パイロットはうまく機体を操作し,車いすに座った状態でテーブルに着席することが,タスククリアの条件となります.
この際,ひざと太ももの半分までを,テーブルの下へ入れなければなりません..
また,パイロットや機体が,テーブルや他のものにふれてしまって,少しでもテーブルを動かしてしまうと,失敗となります.
順位を決める際には、クリアタイムも重要です.このため,パイロットはいかに早く,いかにスムーズに着席するか,慎重かつ大胆に機体を操作します.このタスクでは、機体のスムーズな動きとともに,機体と障害物が接近しすぎて,テーブルなどを動かして芦敗とならないかという微妙な位置関係にドキドキしながら,観戦いただけることと思います.
また、でこぼこ道などの不整地での移動を考えると,大型重機のように大きなタイヤを持つ大きな機体の方が移動しやすくなります.
一方で,このテーブルのように,日常生活では,機体の小ささや小回り性が求められる場面もあります.未来の車いすでは達成すべき非常に重要な技術といえます.

私たちのRT-Mover P-Type WA Mk-IIは,機体の小ささは維持しつつ,全タスクをクリアできるように研究開発を行いました.現在は,クリアタイムを1秒でも早くできるように,練習を重ねています.
タスクのミスのないクリアを達成することはもちろん,クリアタイムを1秒でも早くできるようにするため,模擬コースによる練習を積み重ねています.
模擬コースの設定は,毎回,廊下や部屋で組み立てて,練習が終わると片付ける必要もありますが,皆様からのご声援をいただき、チームメンバー全員がモチベーション高いので,
充実した日々を送っています.ただ,木製であるので,たまにとげが刺さってりしまうことがあったり…,と些細なハプニングも一つの楽しみです.
この際,タスクをクリアするために生じている課題,問題を,チームメンバー全員で共有,認識し,ざっくばらんに議論することにより,一人では得ることができない視野や理解レベルに到達できることがあり,日々楽しみを感じています.特に,パイロットとの議論は,新たな視点を与えてくれるので,非常に勉強になっています.そして,「より人の役に立つものを作ろう」というモチベーションへとつながっています.
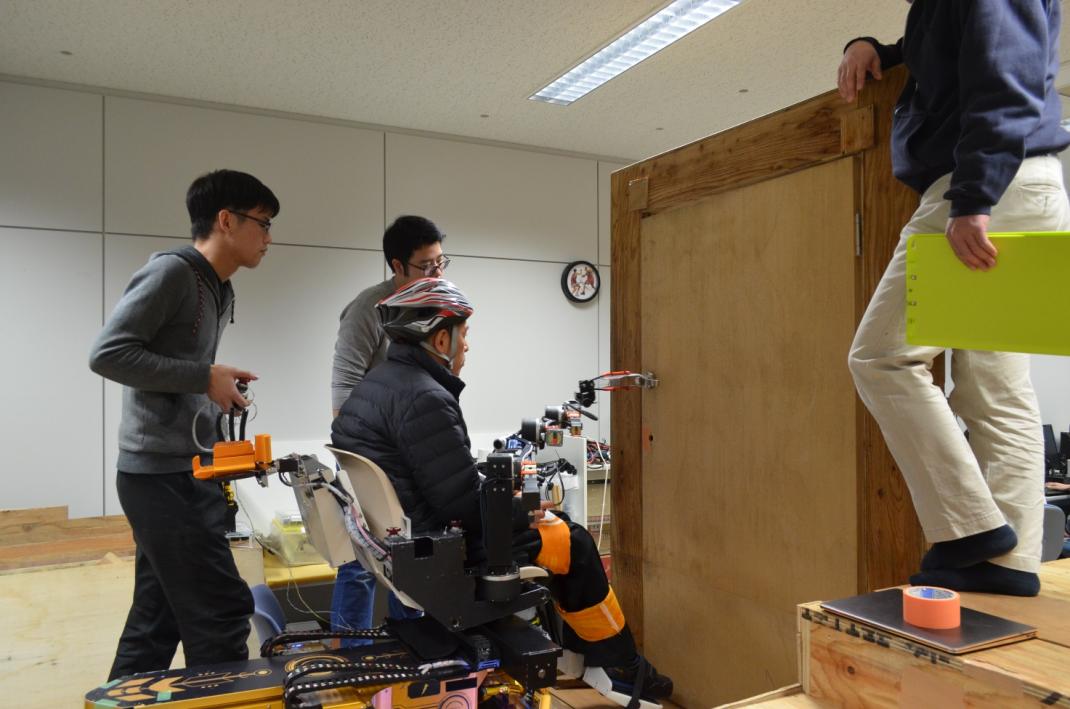
今週は,「ランプ & ドア」というタスクを,重点的に練習しました.
写真は,機体に搭載しているロボットアームにより,ドアを開ける練習をしている様子です.機体のダイナミックな動きに加え,このようなロボットアームによるデモンストレーションは,ダイナミックで迫力のある光景がご覧いただけることと思います.
大会観戦時に皆様に楽しんでいただけることでしょう.


日々の機体メンテナンス
私たちの電動車いすは、研究開発中のものですので、日々の改良、丁寧なメンテナンスが必要です。一つ一つのパーツをしっかりと確認し、問題がないように整備します。例えば、シートや天板、車輪のねじ1本の閉まり具合についても、1つ1つチェックしています。このように、チームメンバー同士が協力し合い、日々のメンテナンスを通して、私たちの機体を最高の状態に仕上げる努力をしています。機体コントロールソフトウェアの改良
機体自体の研究開発、改良とともに、機体をコントロールするためのソフトウェアの改良も重要な項目です。ソフトウェアにバグが生じて、機体の故障等問題を発生させないため、ソースプログラムの改良→シミュレーションによる確認→チームメンバー間での複数回の確認→機体を用いた動作確認というような流れで作業を進めています。複数回、人でのチェックを入れることによって、間違いのない改良を行うようにしています。問題なく、ソフトウェアの改良が終わると、大きな達成感を得ることができるので、モチベーションも上がります。このようなバグのないソフトウェアを維持していくことは、時間もかかりますし、大変難しいことでもあります。メンバー一人一人が責任感を持って、最高の成果を得ることができるように日々取り組んでいます。
今回は、パイロットの守田さんの練習日ではない日の活動をご紹介しました。非常に時間がかかる作業もあります。しかしながら、その分、機体への愛情も十分。また、日常生活では得ることができない経験をすることもできます。

サイバスロンでは,技術者と,技術を操縦する「パイロット」と呼ばれる障害のある方々が,研究開発の段階から協力しながら,レースに挑みます.
サイバスロンで設定されている障害物(タスク)はどれも,電動車いすを使用されている方にとって,日常生活の中で難しいとされるものです. 私たちRT-Moversも他のサイバスロンに出場するチームも,この大会を通して,人の役に立つ技術の研究・開発に取り組んでいます. さて,1月14日と1月15日にも,練習を行いました.
写真は,レースのタスクの一つであるステアーズの練習の一幕です.このタスクでは,6段の階段を,電動車いすを使って昇り降りしなければなりません. 私たちの機体は,脚車輪型です.キャタピラ型とは異なりますので,このタスクをクリアするには工夫が必要でしたが,問題なくクリアすることができるようになりました.
現在は,より確実に,よりスムーズに,クリアタイム短縮に向けて,練習を積み重ねています. 私たちの電動車いすは,市販されている商品ではありません.創意工夫を重ねて実現した世界に一つのだけの機体です.想像されるように,階段を降りる際の衝撃は,機体にとっても影響が大きいです. これまでに,例えば,モータがすぐに壊れてしまうなどの問題が数多くありました. このような意欲的な課題に対して,安全・安心を確実に,機体の性能を向上させながら,いかにクリアするか.日々チームメンバーひとりひとりが切磋琢磨し,挑戦しています
また,このプロジェクトを通して経験できることこそ,実際にヒトとモノが関わる研究開発の難しさであると同時に,奥深さ,面白さであると思っています.
1月14日にRT-Moversはサイバスロンでの優勝を目標に掲げ,クラウドファンディングの挑戦を開始しました.
既に,ご寄付いただいた皆様,誠にありがとうございます.
目標達成に向け,ご支援いただきますよう,よろしくお願いいたします.
↓↓詳しくは以下のURLから内容がご覧いただけます↓↓
クラウドファンディングページ
READYFOR株式会社「目指せ世界の頂上!障害者アスリートの祭典 サイバスロン」

READYFOR株式会社「目指せ世界の頂上!障害者アスリートの祭典 サイバスロン」
*本サイトは cybathlon web site から一部の画像,動画を転載しています
Source of some pictures: cybathlon web site
Copyright © 2020 Wakayama Univercity Cybathlon Project. All Rights Reserved.
![]()