1背景と目的
近年,自動運転車について関心が高まっています.自動運転車の実用化に向けて,様々な研究や開発が行われています.
しかし,観光案内の場において,自動運転技術を用いた情報提示手法の研究は少ないです.そこで,本研究では,視線誘導エージェントを用いた自動観光案内支援システムを開発しています.
自動運転システムとして,和歌山大学のシステム工学部光メカトロニクス学科の中嶋先生が開発している自動運転システムPersonal Mobility Vehicle(以下,PMVと表記)を用いています.
2システムの概要
本システムは,以下のように観光案内を行います.
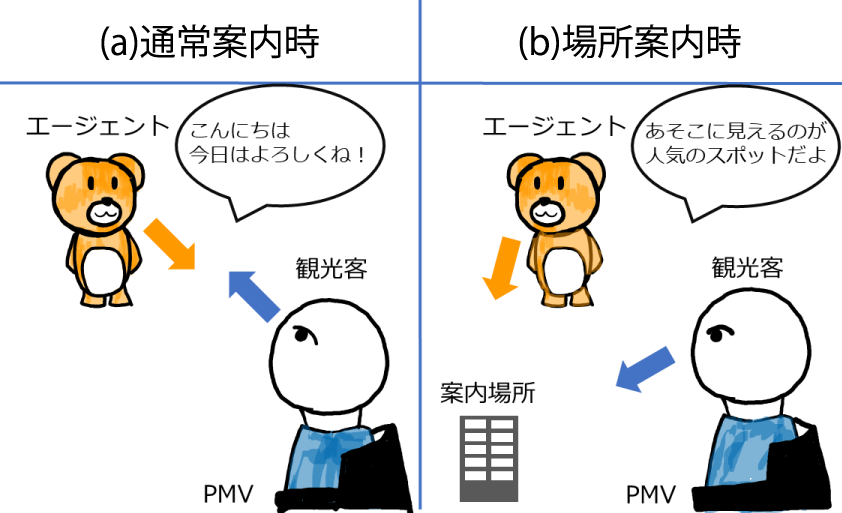
(1) 通常案内時
エージェントと観光客は向かい合ってシステムを利用します.そして,案内場所が近づくまでエージェントは観光客の方を向きながら音声で案内します.(図1(a))
(2) 場所案内時
案内場所が近づくと,エージェントが回転をして案内場所を向きます.そして,案内場所を向き,音声案内を行います.(図1(b))
 |
| 図1. システムの概要 |
|---|
3観光案内支援システム
観光案内支援システムは上のぬいぐるみ部と下のシステム部に分かれています.(図2,図3)
ぬいぐるみ部
本システムでは視線誘導エージェントとしてぬいぐるみを使います.ぬいぐるみが回転することにより視線を誘導します.(図2)
 |
| 図2. システムの外観 |
|---|
システム部
GPSセンサーや地磁気センサーにより「ぬいぐるみの現在位置のデータ,ぬいぐるみが今向いている角度のデータ」を取得します.取得したデータを元に,ぬいぐるみを回転させ,音声案内を行います.(図3)
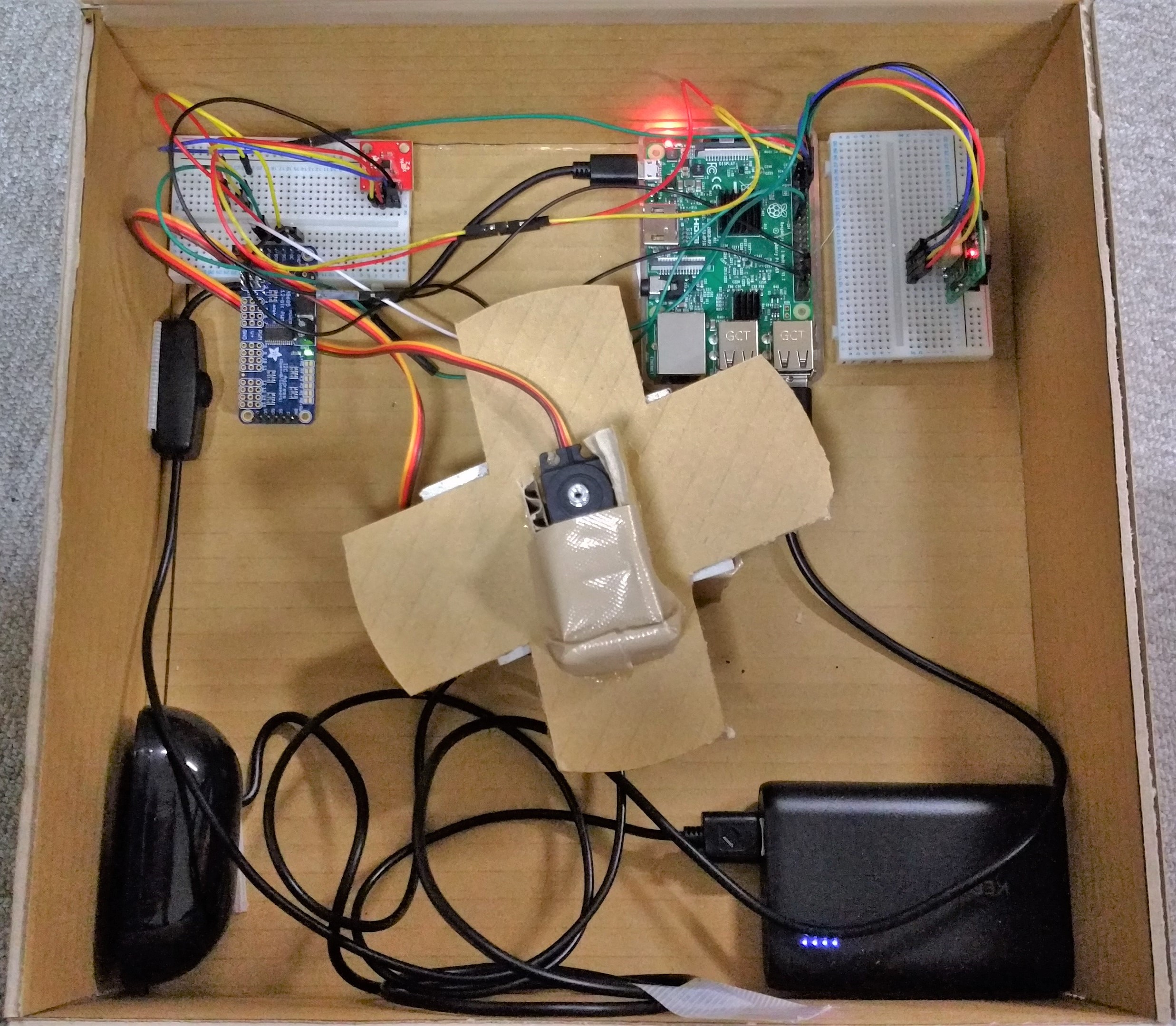 |
| 図3. システムの内部 |
|---|
4デモムービー
発表
- 長田颯斗, 吉野孝: 視線誘導エージェントを用いたPMVのための観光案内支援システムの提案, 電子情報通信学会総合大会,A-14-6,pp.116(2018).
連絡先
- 長田 颯斗:s195040 at center.wakayama-u.ac.jp
- 吉野 孝:yoshino at sys.wakayama-u.ac.jp